খুব প্রায়ই, সৌর প্যানেল কঠোরভাবে এবং স্থায়ীভাবে ইনস্টল করা হয়। এটি সহজ, তবে খুব কার্যকর নয়, কারণ দিনের বেলায় সূর্য আকাশ জুড়ে চলে এবং সৌর প্যানেলগুলি দ্বারা প্রাপ্ত আলোক শক্তির পরিমাণ পরিবর্তিত হয়। সৌর ব্যাটারির সর্বোচ্চ রিটার্ন তখনই সম্ভব যখন আলো তার সমতলে লম্বভাবে প্যানেলে পড়ে। যাতে সূর্যের রশ্মি সৌর প্যানেলে সর্বদা লম্বভাবে পড়ে। বিভিন্ন ডিজাইন এবং জটিলতার বিভিন্ন স্তরের সোলার ট্র্যাকিং সিস্টেম ব্যবহার করা হয়। যদিও এই ধরনের সিস্টেম সৌর প্যানেলগুলির ইনস্টলেশনকে জটিল করে তোলে, তবে এটি আপনাকে তাদের থেকে সর্বাধিক গ্রহণ করতে দেয়। সৌর প্যানেল এখনও সস্তা নয়, এবং আমরা, তাদের বিনিয়োগ করে, অবশ্যই তাদের সম্পূর্ণ সম্ভাবনা উপলব্ধি করতে চাই।
প্রায়শই সহজ ট্র্যাকিং সিস্টেম শুধুমাত্র একটি অক্ষে প্যানেল ঘোরাতে পারে। এই জাতীয় ডিভাইসগুলির মধ্যে রয়েছে এক জোড়া ফটো সেন্সর এবং একজোড়া তুলনাকারী যা একটি ইলেকট্রিক মোটর নিয়ন্ত্রণ করে যা সহজতম H-ব্রিজের কর্ণে অন্তর্ভুক্ত। এই জাতীয় ডিভাইসগুলি অবশ্যই সৌর প্যানেলের দক্ষতা বাড়ায়, তবে তারা এটি খুব দক্ষতার সাথে করে না, কারণ তারা শুধুমাত্র একটি অক্ষের মধ্যে কাজ করে। এই নিবন্ধটি একটি খুব সাধারণ সৌর ট্র্যাকিং সিস্টেম বর্ণনা করে, যা যাইহোক, প্যানেলটিকে দুটি অক্ষে সরাতে পারে, যা সৌর অ্যারের কার্যকারিতা বাড়ায়। অপারেশন চলাকালীন, সিস্টেমটি ক্রমাগত প্যানেলটি অবস্থান করার চেষ্টা করে যাতে এর প্লেনটি সর্বদা ঘটনা সূর্যালোকের সাথে লম্ব থাকে এবং ব্যাটারি থেকে সর্বাধিক বিদ্যুত ফেরত পায়। ট্র্যাকিং ডিভাইসটি ভোর থেকে সূর্যাস্তের শেষ রশ্মি পর্যন্ত সূর্যকে অনুসরণ করে এবং পরের দিন সকালে স্বয়ংক্রিয়ভাবে তার কাজ পুনরায় শুরু করে।
ডিভাইস ডায়াগ্রাম LM339 চিপ রয়েছে, যা একটি সাধারণ প্যাকেজে চারটি অ্যানালগ তুলনাকারী। দুটি মোটর একটি বিশেষ L293D মাইক্রোসার্কিট দ্বারা নিয়ন্ত্রিত হয় - একটি ডুয়াল এইচ-ব্রিজ। মাইক্রোসার্কিট ছাড়াও, সার্কিট ডায়াগ্রামে বেশ কিছু বিচ্ছিন্ন উপাদান রয়েছে। ফটোরেসিস্টর LDR1 - LDR4 আলোর তীব্রতা সেন্সর হিসাবে ব্যবহৃত হয়। এই ফটোরেসিস্টরগুলি সূর্যের রশ্মির সাপেক্ষে সৌর প্যানেলের অবস্থান নির্ধারণ করে।
LM339 তুলনাকারীর সাথে ফটোরেসিস্টর ব্লক L293D মোটর ড্রাইভারের জন্য নিয়ন্ত্রণ সংকেত তৈরি করে। ফটোরেসিস্টর LDR1 এবং LDR2 X অক্ষের সৌর প্যানেলের কোণে, LDR3 এবং LDR4 - Y অক্ষে স্থির করা হয়েছে। নিম্ন ভোল্টেজের মাত্রা।
কাজের অ্যালগরিদম বিবেচনা করুন X অক্ষ বরাবর চলার জন্য দায়ী তার অংশের উদাহরণে সিস্টেম। যদি ফটোরেসিস্টর LDR2 LDR1 থেকে বেশি আলো পায়, তাহলে LDR2-এর প্রতিরোধ LDR1-এর প্রতিরোধের চেয়ে কম হয়ে যায়। তুলনাকারী A1-এর ইনপুটগুলিতে একটি উচ্চ ভোল্টেজের স্তর দেখা যায়। A2 (4, 7)। এই ক্ষেত্রে, তুলনাকারী A2 (1) এর আউটপুটে একটি উচ্চ ভোল্টেজ স্তর উপস্থিত হয়। মোটর M1 সৌর প্যানেলকে ঘুরিয়ে ঘুরতে শুরু করে (বলুন, ঘড়ির কাঁটার বিপরীত দিকে)।
যদি LDR1 LDR2 এর চেয়ে বেশি আলো পায়, তাহলে এর প্রতিরোধ ক্ষমতা LDR2 এর প্রতিরোধের চেয়ে কম হয়ে যায়, যার ফলে তুলনাকারী ইনপুটগুলিতে ভোল্টেজ হ্রাস পায় (4, 7)। তুলনাকারী A2 এর আউটপুট (2) এ, একটি উচ্চ স্তর প্রদর্শিত হয় এবং মোটরটি বিপরীত দিকে ঘুরতে শুরু করে (বলুন, ঘড়ির কাঁটার দিকে)। Y অক্ষ বরাবর ট্র্যাকিং ঠিক একই ভাবে কাজ করে।
নীচের চিত্রটি একটি সৌর ট্র্যাকিং সিস্টেমের একটি সম্ভাব্য নকশা দেখায়। সার্কিটটি একটি ইউনিফাইড ব্রেডবোর্ডে একত্রিত করা যেতে পারে বা এটির জন্য একটি প্রচলিত মুদ্রিত সার্কিট বোর্ড রুট করা যেতে পারে।
শিল্প স্কেলে বিদ্যুৎ উৎপাদনের জন্য সৌর প্যানেল ব্যবহার করার পরে, প্রকৌশলী এবং ডিজাইনাররা এই জাতীয় বিদ্যুৎ কেন্দ্রগুলির কার্যকারিতা বাড়ানোর উপায়গুলি সন্ধান করতে শুরু করেছিলেন। সূর্যের আলোর মোট বিচ্ছুরণ, যা আলোককোষে সূর্যের রশ্মির পতনের দিক পরিবর্তনের দ্বারা নির্ধারিত হয়, দিনের আলোর সময় জুড়ে সৌর প্যানেলগুলির দক্ষ ব্যবহারের অনুমতি দেয়নি। এই পরিস্থিতি থেকে বেরিয়ে আসার একটি উপায় বেশ দ্রুত পাওয়া গিয়েছিল - সৌর প্যানেলগুলি একটি সৌর ট্র্যাকিং সিস্টেমের সাথে সংযুক্ত একটি চলমান বেসে ইনস্টল করা শুরু হয়েছিল।
আপনি জানেন যে, সৌর প্যানেল থেকে সর্বাধিক শক্তি পাওয়ার জন্য, সূর্যের রশ্মিগুলি ব্যাটারির সমতলে লম্বভাবে আঘাত করা প্রয়োজন। রশ্মির এই দিক দিয়ে, সৌর প্যানেলের কার্যকারিতা 50-55% পৌঁছতে পারে। স্থায়ীভাবে ইনস্টল করা ব্যাটারির জন্য, সূর্যালোকের ঘটনার কোণে পরিবর্তনের কারণে এই চিত্রটি 10-15% এ হ্রাস করা যেতে পারে।
সৌর ট্র্যাকিং ডিভাইস দুটি প্রধান অংশ নিয়ে গঠিত:
1. নিয়ন্ত্রণ পরিকল্পনা, যা সূর্যের অবস্থান নির্ধারণ করে। একটি সৌর ট্র্যাকিং ডিভাইস বা অন্যথায় একটি ট্র্যাকার (সোলার ট্র্যাকার) এর সবচেয়ে সহজ চিত্রটি নীচে দেখানো হয়েছে। সূর্যের অবস্থান নির্ধারণ করতে, দুটি ফটোরেসিস্টর ব্যবহার করা হয়। স্কিম অন্তর্ভুক্ত:
- LM1458 অপারেশনাল এমপ্লিফায়ার চিপ (K140UD20);
- ট্রানজিস্টর BD139 (KT815G, KT961A) এবং BD140 (KT814G, KT626V);
- ফটোরেসিস্টর;
- ডায়োড 1N4004 (KD243G);
- প্রতিরোধক এবং টিউনিং প্রতিরোধক।

2. সূর্যের রশ্মির দিকের উপর নির্ভর করে ব্যাটারিগুলিকে বাঁকানো এবং কাত করার প্রক্রিয়া। টিল্ট মেকানিজম যেকোন ভৌগলিক অক্ষাংশে এই ধরনের ট্র্যাকিং সিস্টেম ব্যবহার করার অনুমতি দেয়: 320 উত্তর অক্ষাংশের সাথে সামঞ্জস্যপূর্ণ একটি এলাকায় সৌর প্যানেল ইনস্টল করার সময়, ডিভাইসের অক্ষটি দিগন্তের সাপেক্ষে 320 ঘোরানো আবশ্যক। ট্র্যাকিং সিস্টেমের সমস্ত প্রক্রিয়াগুলির ড্রাইভগুলি বৈদ্যুতিক মোটরগুলির ভিত্তিতে তৈরি করা হয়, যা নিয়ন্ত্রণ ব্যবস্থা দ্বারা প্রভাবিত হয়। বৈদ্যুতিক মোটর এবং নিয়ন্ত্রণ ব্যবস্থা সৌর প্যানেল দ্বারা চালিত হয়, তাই এই ধরনের ইনস্টলেশন স্বায়ত্তশাসিত।
আপনি দেখতে পাচ্ছেন, সোলার ট্র্যাকারের স্কিম এবং ডিভাইসটি বেশ সহজ। স্বাভাবিকভাবেই, শিল্প স্কেলে আরও জটিল সিস্টেম ব্যবহার করা হয়, তবে সৌর প্যানেলের উপর ভিত্তি করে বিদ্যুৎ উৎপাদনের জন্য একটি পরিবারের ইনস্টলেশনের জন্য একটি অনুরূপ স্কিম স্বাধীনভাবে একত্রিত করা যেতে পারে।

নেটওয়ার্কটিতে সৌর ট্র্যাকিং সিস্টেমের জন্য প্রচুর পরিমাণে তৈরি স্কিম এবং সমাধান রয়েছে। সুতরাং, যদি সৌর প্যানেলগুলির নকশা উন্নত করতে এবং তাদের কার্যকারিতা বাড়ানোর প্রয়োজন হয় তবে সর্বদা এটি নিজে করার সুযোগ রয়েছে।
একটি সৌর ট্র্যাকার হল একটি ইলেকট্রনিক-যান্ত্রিক সিস্টেম যা সূর্যের দিকে সৌর প্যানেল নির্দেশ করার জন্য ডিজাইন করা হয়েছে। সিস্টেমটি আকাশে সূর্যের অবস্থান ট্র্যাক করে এবং একটি সার্ভো নিয়ন্ত্রণ করে যা প্যানেলগুলিকে যথাযথ দিকে ঘোরায়। এই জাতীয় ট্র্যাকার ব্যবহার আপনাকে সৌর প্যানেল থেকে সর্বাধিক কর্মক্ষমতা পেতে দেয়।
ইন্টারনেটে পাওয়া বেশিরভাগ বাড়িতে তৈরি ট্র্যাকারগুলি আরডুইনোতে একত্রিত হয়, সূর্যের অবস্থান নির্ধারণ করতে ফটোসেন্সর ব্যবহার করা হয়। আলোকসজ্জার ডিগ্রি এবং ফটো সেন্সরগুলির আপেক্ষিক অবস্থানের উপর নির্ভর করে, সর্বাধিক আলোকসজ্জার দিকে একটি বাঁক সঞ্চালিত হয়। এই পদ্ধতির অসুবিধা রয়েছে: মেঘলা আবহাওয়ায় সিস্টেমটি কীভাবে আচরণ করবে তা জানা নেই; চাঁদের আলো এবং উজ্জ্বল আলোর উত্স, সেইসাথে পৃথক মেঘের প্রতিক্রিয়ার ক্ষেত্রে কম শব্দ প্রতিরোধ ক্ষমতা।
উপরের অসুবিধাগুলির কারণে, আমি একটি অর্থনৈতিক সার্ভো-চালিত সৌর ট্র্যাকারের নিজস্ব সংস্করণ তৈরি করেছি যা ভৌগলিক অবস্থান নির্বিশেষে যে কোনও সময় দৃশ্যমান আকাশ জুড়ে সূর্যের ট্র্যাকিং সরবরাহ করে।
আকাশে সূর্যের অবস্থান শুধুমাত্র ফটো সেন্সরগুলির আলোকসজ্জা দ্বারা নয়, পর্যবেক্ষণ বিন্দুর ভৌগোলিক স্থানাঙ্ক এবং সঠিক সময়ের উপর ভিত্তি করে মহাকাশীয় বলবিদ্যার সূত্র দ্বারাও নির্ধারণ করা যেতে পারে। এখন মহাকাশীয় যান্ত্রিকতা সম্পর্কিত অনেক সংজ্ঞা এবং সূত্র থাকবে, তাই আপনার কনভল্যুশন স্ট্রেন করার জন্য প্রস্তুত হন)। সৌর প্যানেলগুলি নির্দেশ করতে, আপনাকে সূর্যের অনুভূমিক স্থানাঙ্কগুলি নির্ধারণ করতে হবে, এটি হল উচ্চতা এবং আজিমুথ। এই স্থানাঙ্ক ব্যবস্থার কেন্দ্রটি পর্যবেক্ষকের অবস্থানের সাথে মিলে যায়, গণনাগুলি গাণিতিক দিগন্তের সমতলের সাথে সম্পর্কিত হয়।
উচ্চতা h হল মাদুরের সমতলের মধ্যবর্তী কোণ। দিগন্ত এবং ল্যুমিনারির দিক, 0⁰ থেকে +90⁰ থেকে জেনিথ পর্যন্ত এবং 0⁰ থেকে -90⁰ নাদির পর্যন্ত গণনা করা হয়।
আজিমুথ A - মধ্যাহ্ন রেখা (মোটামুটিভাবে বলতে গেলে, দক্ষিণের দিক) এবং মাদুর সমতলের ছেদ রেখার মধ্যে কোণ। দীপ্তির উল্লম্ব বৃত্তের সমতল সহ দিগন্ত। এটি 0⁰ ... 360⁰ এর মধ্যে স্বর্গীয় গোলকের দৈনিক ঘূর্ণনের দিক থেকে দক্ষিণ বিন্দু থেকে গণনা করা হয়, অথবা 0⁰ থেকে +180⁰ পশ্চিমে এবং 0⁰ থেকে −180⁰ পূর্বে। পৃথিবীর প্রতিদিনের ঘূর্ণনের কারণে তারার অনুভূমিক স্থানাঙ্ক ক্রমাগত পরিবর্তিত হচ্ছে।
নীচে লুমিনারির উচ্চতা এবং আজিমুথ গণনা করার জন্য সূত্রগুলি রয়েছে:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ খরচ);
A = atan2 (cos
যেখানে δ হল নক্ষত্রের পতন, t হল তারার ঘন্টা কোণ, ϕ হল পর্যবেক্ষণ বিন্দুর অক্ষাংশ (উত্তর গোলার্ধের জন্য 0⁰…+90⁰, দক্ষিণের জন্য 0⁰…-90⁰, 0⁰ হল বিষুবরেখা)।
atan2(y, x) ফাংশনের ডিক্রিপশন: 
আপনি দেখতে পাচ্ছেন, অনুভূমিক স্থানাঙ্কগুলি গণনা করতে, নক্ষত্রের হ্রাস এবং ঘন্টা কোণ গণনা করা প্রয়োজন। এই স্থানাঙ্কগুলি প্রথম নিরক্ষীয় স্থানাঙ্ক ব্যবস্থাকে নির্দেশ করে, যেখানে প্রধান সমতল হল মহাকাশীয় বিষুবরেখার সমতল।
পতন δ - মহাকাশীয় বিষুবরেখার সমতল এবং আলোক গ্রহের দিকের মধ্যবর্তী কোণটি 0⁰ থেকে +90⁰ উত্তর মেরুর দিকে এবং 0⁰ থেকে -90⁰ দক্ষিণ মেরুর দিকে পরিমাপ করা হয়।
ঘণ্টার কোণ t হল আকাশের মেরিডিয়ানের সমতল এবং ল্যুমিনারির অবনমন বৃত্তের মধ্যবর্তী ডিহেড্রাল কোণ। এটি মহাকাশীয় গোলকের দৈনিক ঘূর্ণনের দিকে, মহাকাশীয় বিষুবরেখার উপরের বিন্দুর পশ্চিমে, 0⁰ ... 360⁰ এর মধ্যে, বা 00:00 থেকে 24:00 (ঘণ্টাপ্রতি) মধ্যে গণনা করা হয়। এছাড়াও, ঘণ্টার কোণ পশ্চিমে 0⁰ থেকে 180⁰ (00:00 থেকে 12:00 পর্যন্ত) এবং পূর্বে 0⁰ থেকে −180⁰ (00:00 থেকে -12:00 পর্যন্ত) পরিমাপ করা যেতে পারে। সত্য দুপুরে সূর্যের জন্য নক্ষত্রের ঊর্ধ্ব সমাপ্তির মুহুর্তে ঘন্টার কোণ 0 এর সমান (সর্বদা একই সময় নয় যখন ঘড়িতে স্থানীয় সময় 12:00 দেখায়)।
সূর্যের পতন সারা বছর (অসমভাবে) -23.43⁰ থেকে +23.43⁰তে পরিবর্তিত হয়, সূর্যের চারপাশে পৃথিবীর কক্ষপথের গতির কারণে, এবং পৃথিবীর প্রতিদিনের ঘূর্ণনের সাথে সম্পর্কিত নয়। বছরের যেকোনো দিনের জন্য সূর্যের ক্ষয় নির্ধারণের জন্য, সবচেয়ে সহজ উপায় হল 4 বছরের চক্রের গড় পতনের মানের টেবিল থেকে। নিবন্ধের শেষে টেবিলটি ডাউনলোড করা যেতে পারে।
দিনের বেলা তারার ঘন্টা কোণ পরিবর্তিত হয় (পৃথিবীর দৈনিক ঘূর্ণনের কারণে), এটি গণনা করা যেতে পারে, প্রকৃত সৌর সময় জেনে:
t \u003d Ts.ist - 12:00 h, (-12:00 ... + 11:59),
যেখানে Ts.ist সত্য সৌর সময় (00:00…23:59h)।
স্থানীয় সময়, সময় অঞ্চল এবং পর্যবেক্ষণ বিন্দুর দ্রাঘিমাংশ জেনে সত্যিকারের সৌর সময় গণনা করা যেতে পারে:
Ts.ist = Ts.av + EOT, বা Ts.ist = UTC + λ + EOT,
যেখানে Ts.av হল পৃথিবীর কোন এক বিন্দুতে গড় সৌর সময় (বিন্দুর দ্রাঘিমাংশের উপর নির্ভর করে), UTC হল সার্বজনীন সমন্বিত সময়, λ হল ঘন্টার এককে পর্যবেক্ষণ বিন্দুর দ্রাঘিমাংশ, EOT হল সময়ের সমীকরণ।
সমন্বিত সর্বজনীন সময় স্থানীয় সময় (Tm) এবং সময় অঞ্চল (N) থেকে গণনা করা যেতে পারে: UTC = Tm – N। অবস্থান দ্রাঘিমাংশ λ প্রাইম মেরিডিয়ান (পূর্ব দ্রাঘিমাংশ) এর 0⁰ থেকে 180⁰ পূর্ব পর্যন্ত এবং 0⁰ থেকে -180⁰ পর্যন্ত পরিমাপ করা হয় to the west (পশ্চিম দ্রাঘিমাংশ)। উপরের সূত্রে প্রতিস্থাপন করার সময়, দ্রাঘিমাংশকে ঘন্টার এককে রূপান্তর করতে হবে (1⁰ = 4 মিনিট)।
EOT সময়ের সমীকরণটি গড় সৌর সময় এবং সত্যিকারের সৌর সময়ের মধ্যে পার্থক্য দেখায়, যেহেতু পৃথিবীর কক্ষপথের উপবৃত্তাকার কারণে সূর্যের দৈনিক গতি অসম, সেইসাথে গ্রহন সমতলের দিকে পৃথিবীর অক্ষের প্রবণতার কারণে:
EOT = 9.87 ∙ sin2B - 7.53 ∙ cosB - 1.5 ∙ sinB,
যেখানে B = (360⁰ (N-81))/365, N হল বছরের দিনের ক্রমিক সংখ্যা।
এইভাবে, বছরে, সময়ের সমীকরণের মান -14.3 মিনিট থেকে +16.4 মিনিটে পরিবর্তিত হয়।
এক বছরের মধ্যে সময়ের সমীকরণ কীভাবে পরিবর্তিত হয় তার একটি গ্রাফ নীচে দেওয়া হল: 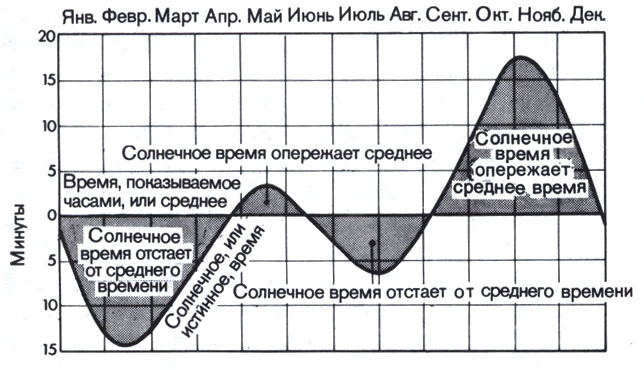
আমাকে এই সমস্ত গণনাগুলি মাইক্রোকন্ট্রোলার প্রোগ্রামে চালাতে হয়েছিল, আমি অ্যাসেম্বলারে লেখার সাহস পাইনি, তাই আমি এসআই অধ্যয়ন করতে শুরু করি, সঠিক ফলাফল পেতে আমাকে কয়েক সপ্তাহ ধরে সূত্র এবং গণনার সাথে বাঁশি করতে হয়েছিল, পথ ধরে এসআই অধ্যয়ন করতে হয়েছিল। ফলস্বরূপ, আমি একটি কার্যকরী প্রোগ্রাম লিখতে পেরেছি, যখন গণনার ত্রুটি ±1⁰ অতিক্রম করে না।
একটি লিথিয়াম-আয়ন ব্যাটারি চার্জ করার জন্য 2W এর শক্তি এবং 6V এর ভোল্টেজ সহ একটি ছোট সোলার ব্যাটারির জন্য সোলার ট্র্যাকারটি কল্পনা করা হয়েছিল, তবে কমপক্ষে 4W এর আরও শক্তিশালী ব্যাটারি ব্যবহার করা ভাল। বৈদ্যুতিক ড্রাইভ হিসাবে, আমি MG996R servos ব্যবহার করেছি (আপনি চীনে কিনতে পারেন, লিঙ্কটি নিবন্ধের শেষে দেওয়া হয়েছে)। উপরন্তু, আমি একটি Alt-Azimuth ইনস্টলেশন একত্রিত করার জন্য বিশেষ বন্ধনী কিনেছি (নিবন্ধের শেষে অর্ডার করার জন্য লিঙ্ক)। একত্রিত নকশা আপনাকে সৌর ব্যাটারিকে উচ্চতা এবং আজিমুথের দিকনির্দেশ করতে দেয়, যখন আজিমুথ সার্ভো স্থির থাকে এবং বন্ধনীর সাথে একসাথে উচ্চতার সার্ভো ঘোরায়।
নীচে সোলার ট্র্যাকারের একটি চিত্র দেওয়া হল: ![]()
সার্কিটটি PIC16F876A মাইক্রোকন্ট্রোলারের উপর ভিত্তি করে তৈরি করা হয়েছে, এতে উল্লেখযোগ্য পরিমাণে মেমরি রয়েছে এবং এতে অনেক পেরিফেরাল মডিউল রয়েছে। পুরো কাঠামোটি একটি লি-আয়ন ব্যাটারি দ্বারা চালিত, যা TP4056 চিপের উপর ভিত্তি করে একটি মডিউলের মাধ্যমে একটি সৌর ব্যাটারি থেকে চার্জ করা হয়, এটি লি-আয়ন ব্যাটারির জন্য একটি বিশেষ চার্জ কন্ট্রোলার (নিবন্ধের শেষে অর্ডার লিঙ্ক) . বর্তমান সময় এবং তারিখ নির্ধারণ করতে, স্কিমটি একটি মডিউল ব্যবহার করে (নিবন্ধের শেষে অর্ডার করার জন্য লিঙ্ক)। ঘড়িটি বেশ নির্ভুল, সময় প্রবাহ প্রতি বছর ± 2 মিনিট, আমি ইতিমধ্যে তাদের সম্পর্কে একটি বিস্তারিত নিবন্ধ লিখেছি, যারা চান তারা নিজেদের পরিচিত করতে পারেন। প্যারামিটারগুলি প্রদর্শন করতে, একটি ডিজিটাল সূচক ব্যবহার করা হয় (নিবন্ধের শেষে অর্ডার করার জন্য লিঙ্ক)।
লি-আয়ন ব্যাটারির সর্বোচ্চ ভোল্টেজ 4.1V এর বেশি নয়, যা সার্ভোকে পাওয়ার জন্য যথেষ্ট নয়, তাই সার্কিটে MT3608 চিপের উপর ভিত্তি করে একটি স্টেপ-আপ মডিউল যোগ করা হয়েছে (নিবন্ধের শেষে অর্ডার লিঙ্ক ) মডিউলটির সর্বনিম্ন ইনপুট ভোল্টেজ হল 2V, সর্বাধিক লোড কারেন্ট হল 2A, মডিউলটিতে আউটপুট ভোল্টেজ সামঞ্জস্য করার জন্য একটি মাল্টি-টার্ন ভেরিয়েবল রেসিস্টর রয়েছে। শক্তি সঞ্চয় করার জন্য, সার্ভোগুলিতে শক্তি ক্রমাগত সরবরাহ করা হয় না, তবে কেবল শ্যাফ্টের অবস্থান পরিবর্তন করার জন্য। একটি পি-চ্যানেল ফিল্ড-ইফেক্ট ট্রানজিস্টর VT1 ব্যবহার করে পাওয়ার সুইচ করা হয়, কনভার্টার মডিউলটি মাইক্রোকন্ট্রোলার থেকেও নিয়ন্ত্রিত হয়।
মডিউল বোর্ড নিয়ন্ত্রণের জন্য একটি পরিচিতি প্রদান করে না, তাই অতিরিক্তভাবে MT3608 চিপের 4 র্থ পিনে তারটি সোল্ডার করা প্রয়োজন, এটি কনভার্টারের অন/অফ ইনপুট। বোর্ডে, এই পিনটি "+" পাওয়ার সাপ্লাইয়ের সাথে সংযুক্ত রয়েছে, প্রথমে আপনাকে এই পিনের জন্য উপযুক্ত ট্র্যাকগুলি কাটতে হবে (এর জন্য আপনাকে মাইক্রোসার্কিটটি আনসোল্ডার করতে হবে), বা বোর্ডের উপরে পিনটি বাড়াতে হবে। মডিউল বোর্ডে একটি ভোল্টেজ বিভাজক প্রতিরোধক চিপ ইনস্টল করা আছে, এই প্রতিরোধকের প্রতিরোধের বৃদ্ধি স্লিপ মোডে খরচও কমিয়ে দেবে, আমি এটিকে অন্য একটি দিয়ে প্রতিস্থাপন করেছি, 9.1 kOhm এর প্রতিরোধের সাথে, প্রাথমিকভাবে এটি 2.2 kOhm ছিল। প্রতিস্থাপনের পরে, সার্ভোগুলিকে পাওয়ার জন্য আপনাকে আউটপুট ভোল্টেজ প্রায় 5-5.5V সেট করতে হবে, নীচের চিত্রটি: 
ঘড়ির মডিউলটিকেও উন্নত করতে হবে, বিদ্যুৎ খরচ কমাতে, আপনাকে 24c32 মেমরি চিপ, "পাওয়ার" এলইডি, সেইসাথে প্রতিরোধক (200 ওহম) সোল্ডার করতে হবে, যার মাধ্যমে ব্যাটারিতে বাহ্যিক সরবরাহ ভোল্টেজ সরবরাহ করা হয়। , কেন চাইনিজরা এটা করেছিল তা বোধগম্য নয়, কারণ ব্যাটারি চার্জের উদ্দেশ্যে নয়, নীচের ছবিটি দেখুন: 
HL1 LED DS3231 ঘড়ির (I2C ইন্টারফেসের মাধ্যমে) সাথে যোগাযোগের ত্রুটি নির্দেশ করার জন্য সেট করা হয়েছে, ঘড়ি থেকে কোনো প্রতিক্রিয়া না থাকলে LED জ্বলতে শুরু করে।
অল্ট-অ্যাজিমুথ সেটআপের সমাবেশ শুরু করা উচিত যখন সার্ভোগুলি মধ্যম অবস্থানে সেট করা হয়, এটি ঘটে যখন ডিভাইসটি প্রথম চালু করা হয়, সূচকটি "সেন্ট" শিলালিপি দেখাবে। এটি একটি প্লেটে আজিমুথ সার্ভো মাউন্ট করা বাঞ্ছনীয় যা ইনস্টলেশনের ভিত্তি হিসাবে কাজ করবে বা একটি স্ট্যান্ডে, যাতে আউটপুট শ্যাফ্টটি উল্লম্বভাবে উপরের দিকে নির্দেশিত হয়। এর পরে, আপনাকে উচ্চতা সার্ভো বন্ধনীটি সংযুক্ত করতে হবে, প্রথমে আপনাকে স্লাইডিং হাতাটিকে বন্ধনীতে স্ক্রু করতে হবে, তারপর অ্যাডাপ্টারের হাতা। বন্ধনীটি অবশ্যই আজিমুথ সার্ভোর দীর্ঘ দিকে লম্বভাবে সেট করা উচিত, যেমনটি ফটোতে দেখানো হয়েছে: 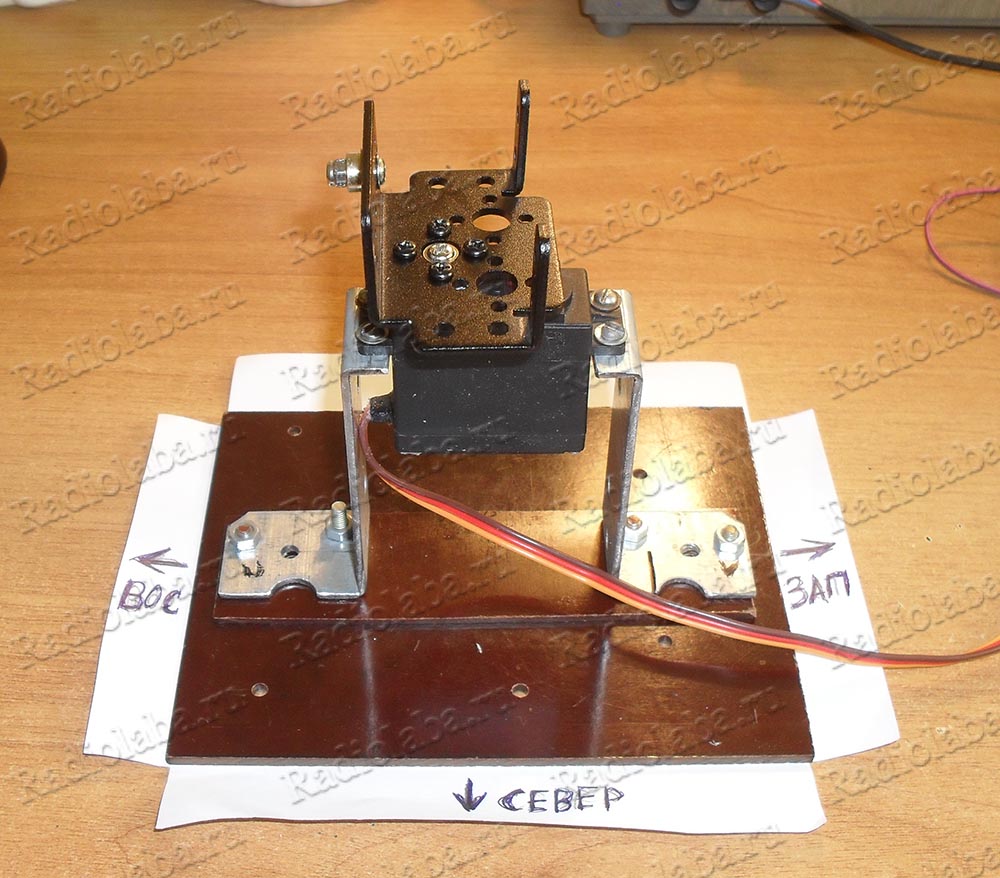
একত্রিত করার সময়, একটি লম্ব অবস্থান অর্জন করা কঠিন, তবে এটি প্রয়োজনীয় নয়, ± 5-10 ডিগ্রির মধ্যে বিচ্যুতি গ্রহণযোগ্য। ভবিষ্যতে, সফ্টওয়্যার সমন্বয় এই বিচ্যুতি দূর করবে।
উচ্চতা servo ঠিক করার পরে, এটি ক্যারিয়ার বন্ধনী বেঁধে রাখা অবশেষ, প্রথমে সার্ভো শ্যাফ্টের অ্যাডাপ্টারের হাতাতে চেষ্টা করুন, একটি অবস্থান নির্বাচন করুন যাতে ইনস্টলেশনের পরে ক্যারিয়ার বন্ধনীটি উল্লম্বভাবে উপরের দিকে নির্দেশিত হয়। আবার, সঠিক অবস্থান নির্ধারণ করার প্রয়োজন নেই, আমি আগেই বলেছি। ইনস্টলেশনের একটি সাধারণ দৃশ্য নিম্নলিখিত ফটোতে দেখানো হয়েছে: 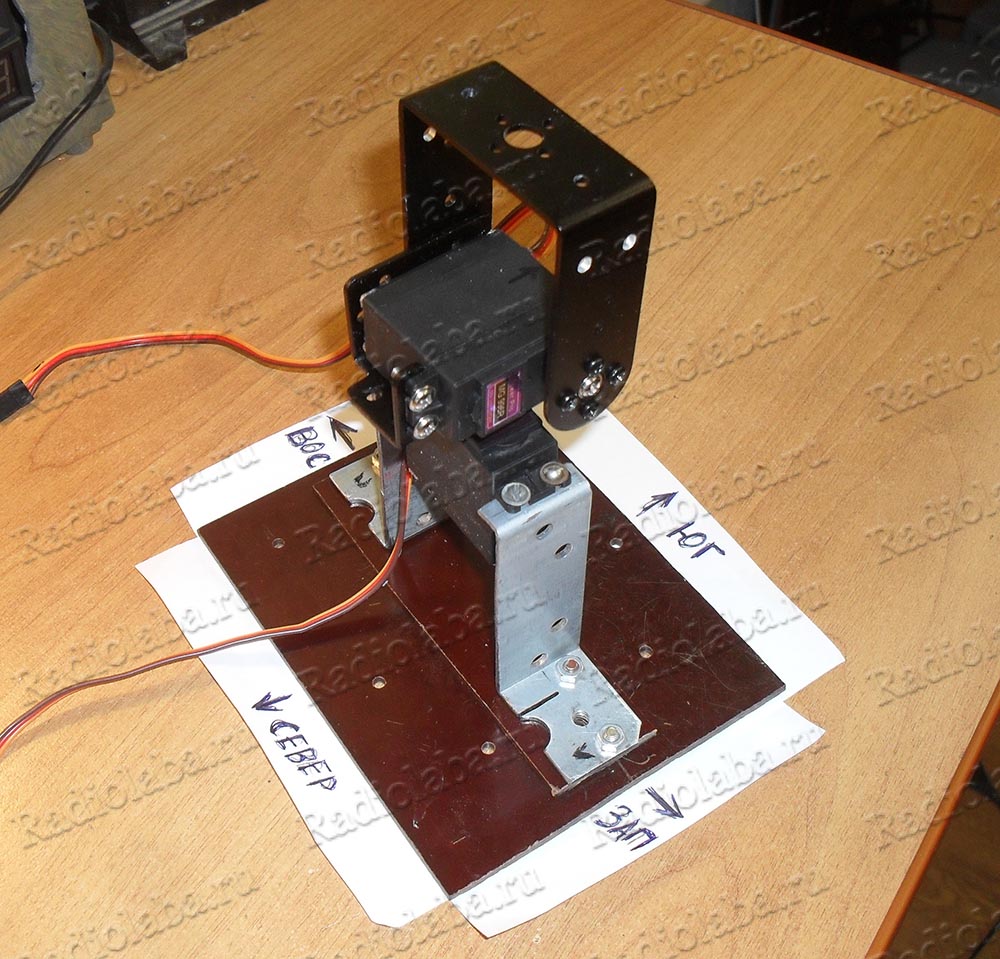
সার্ভোগুলির চরম অবস্থানগুলি সামঞ্জস্য করার জন্য নিম্নলিখিত পদ্ধতিটি রয়েছে। সামঞ্জস্য একটি সমতল পৃষ্ঠে সঞ্চালিত করা উচিত, যখন সার্ভো শ্যাফ্ট অজিমুথলি উল্লম্ব হয় (ঘূর্ণনের অক্ষটি একটি প্লাম্ব লাইন বরাবর নির্দেশিত হয়)। "এন্টার" বোতাম টিপানোর পরে, সমর্থনকারী বন্ধনীটি শর্তসাপেক্ষ উত্তরের দিকে মোড় নেয় এবং একটি অনুভূমিক অবস্থান নেয় (সূচকটিতে "উত্তর" শিলালিপি প্রদর্শিত হয়): 
যদি অনুভূমিক থেকে কোনও বিচ্যুতি থাকে তবে আপনাকে "সেট" এবং "ডিসচার্জ" বোতামগুলি ব্যবহার করে বন্ধনীটির অবস্থান সামঞ্জস্য করতে হবে। এইভাবে, সার্ভোর চরম অবস্থান সামঞ্জস্য করা হয়। আরও, যখন "এন্টার" বোতামটি চাপানো হয়, তখন বন্ধনীটি শর্তযুক্ত দক্ষিণের দিকে মোড় নেয় (সূচকটিতে দক্ষিণ লেখা হয়)। প্রয়োজনে, উপরে বর্ণিত হিসাবে বন্ধনীটির অনুভূমিক অবস্থান সামঞ্জস্য করুন।
"এন্টার" বোতামটি আরও টিপে বাহুটিকে প্রচলিত পূর্বের দিকে ঘুরিয়ে দেবে (সূচকটিতে একটি শিলালিপি EAST রয়েছে)। "সেট" এবং "ডিসচার্জ" বোতামগুলি দিকটি সংশোধন করে, যখন এটি আজিমুথ সার্ভো ড্রাইভের শরীরের উপর ফোকাস করা সুবিধাজনক, তখন উপরের থেকে দেখা হলে বন্ধনীটি শরীরের দীর্ঘ দিক বরাবর নির্দেশিত হওয়া প্রয়োজন: 
পরের বার যখন আপনি "এন্টার" বোতাম টিপুন, বন্ধনীটি পশ্চিম দিকে ঘুরবে (সূচকটি WEST শিলালিপি দেখায়), উপরে বর্ণিত হিসাবে সামঞ্জস্য করা হয়।
সংশোধনের ফলস্বরূপ, বন্ধনীটি 180⁰ এর মধ্যে উচ্চতা এবং অজিমুথে ঘোরানো হয়, সংশোধনের মানগুলি মাইক্রোকন্ট্রোলারের EEPROM মেমরিতে সংরক্ষণ করা হয়। "এন্টার" বোতাম টিপানোর পরে, বন্ধনীটি শর্তযুক্ত দক্ষিণে সঠিক দিক নিয়ে যাবে। সৌর ব্যাটারির সঠিক দিকনির্দেশের জন্য, শর্তযুক্ত দক্ষিণের দিকটি প্রদত্ত এলাকায় দক্ষিণের আসল বিন্দুকে নির্দেশ করা উচিত এবং আজিমুথের সার্ভো ড্রাইভ শ্যাফ্টটি একটি প্লাম্ব লাইন বরাবর উল্লম্বভাবে অবস্থিত।
আবার "এন্টার" বোতাম টিপানোর পরে, সময়, তারিখ, সময় অঞ্চল, অবস্থান স্থানাঙ্ক এবং স্লিপ মোডের সময়কাল সেট করা উচিত। তদনুসারে, প্রতিটি পরামিতির জন্য, নিম্নলিখিত শিলালিপিগুলি নির্দেশকটিতে প্রদর্শিত হয়:
- স্থানীয় সময়, ডিফল্টরূপে 0 ঘন্টা 0 মিনিট;
- অবস্থান দ্রাঘিমাংশ, ডিফল্টরূপে -0 ডিগ্রী। 0 মিনিট (পশ্চিম দ্রাঘিমাংশের জন্য, একটি বিয়োগ চিহ্ন "-" রাখা হয়);
- অবস্থান অক্ষাংশ, ডিফল্টভাবে -0 ডিগ্রী। 0 মিনিট (দক্ষিণ অক্ষাংশের জন্য, একটি বিয়োগ চিহ্ন "-" রাখা হয়);
– টাইম জোন, ডিফল্টভাবে -0, (পশ্চিম দ্রাঘিমাংশের জন্য একটি বিয়োগ চিহ্ন "-" রাখা হয়);
- স্লিপ মোডের সময়কাল, ডিফল্ট 1 মিনিট।
"ডিসচার্জ" এবং "সেট" বোতামগুলি প্যারামিটারের মানগুলি সেট করে, যখন "এন্টার" বোতামটি চাপানো হয়, সময় এবং তারিখের মানগুলি তে লেখা হয়, বাকি প্যারামিটারগুলি মাইক্রোকন্ট্রোলারের EEPROM মেমরিতে সংরক্ষণ করা হয়। সমস্ত পরামিতি প্রবেশ করার পরে, সূচকটি শিলালিপি SUCCES প্রদর্শন করে (1 সেকেন্ডের জন্য, তারপর সূচকটি বেরিয়ে যায়), তারপরে প্রবেশ করা পরামিতি অনুসারে ইনস্টলেশনটি সূর্যের দিকে লক্ষ্য করা হয়।
শক্তি সঞ্চয় করতে, সূর্যের দিকে লক্ষ্য করা একটি নির্দিষ্ট সময়ের পরে সঞ্চালিত হয়, যা স্লিপ মোড সময়কাল প্যারামিটারে সেট করা হয়। নির্দেশ করার পরে, সার্ভগুলি ডি-এনার্জাইজ করা হয়, মাইক্রোকন্ট্রোলার স্লিপ মোডে যায়, ট্র্যাকারের মোট খরচ 160 μA এ হ্রাস পায়। "ঘুম" এর সময়কাল 1-255 মিনিটের মধ্যে সেট করা যেতে পারে।
যখন ট্র্যাকারটি আবার চালু করা হয় (পাওয়ার বন্ধ করার পরে), EEPROM মেমরিটি প্রথমে চেক করা হয়, যদি সংরক্ষিত প্যারামিটারগুলি সঠিক থাকে, ট্র্যাকারটি সূর্যের ট্র্যাকিং চালিয়ে যায়, যখন ডিজিটাল সূচকটি স্লিপ মোডে থাকে এবং চালু হয় না শক্তি সংরক্ষণ করুন. পরামিতিগুলির প্রাথমিক ইনপুট করার পরে আপনি সাধারণত সূচকের শক্তি বন্ধ করতে পারেন। সংশোধন মোডে পুনরায় প্রবেশ করতে, আপনাকে ট্র্যাকারে "সেট" বোতাম এবং পাওয়ার ধরে রাখতে হবে। যদি EEPROM থেকে পড়া পরামিতিগুলি ভুল বা অনুপস্থিত থাকে তবে এটি সংশোধন মোডেও প্রবেশ করবে।
আমি অতিরিক্তভাবে মাইক্রোকন্ট্রোলার প্রোগ্রামে UART ইন্টারফেসের মাধ্যমে প্রধান পরামিতি আউটপুট করার ফাংশন যোগ করেছি। সূর্যের অবস্থান গণনা করার পরে, মাইক্রোকন্ট্রোলার সময়, তারিখ, দিনের ক্রমিক নম্বর, সেটআপের সময় প্রবেশ করা অবস্থান স্থানাঙ্ক, সেইসাথে সূর্যের উচ্চতা এবং আজিমুথের বর্তমান মানগুলি প্রেরণ করে। প্রতিটি প্যারামিটার "$" চিহ্ন দিয়ে শুরু হয় এবং "\r", "\n" চিহ্ন দিয়ে শেষ হয়। একটি USB-UART অ্যাডাপ্টারের মাধ্যমে ট্র্যাকার সংযোগ করে এই ডেটা কম্পিউটারে দেখা যেতে পারে। টার্মিনাল প্রোগ্রামের সেটিংসে, আপনাকে নিম্নলিখিত সেটিংস সেট করতে হবে: বড রেট 9600 বিপিএস, 8 ডেটা বিট, এক স্টপ বিট। নীচে টার্মিনাল প্রোগ্রাম থেকে একটি স্ক্রিনশট আছে: ![]()
MG996R servos কেসের ভিতরে আর্দ্রতা থেকে সুরক্ষিত নয়, তাই বহিরঙ্গন ব্যবহারের ক্ষেত্রে, servos অবশ্যই সিল করা উচিত। কেসের নীচের দিক থেকে চারটি বোল্ট সরান, এবং কেসের জয়েন্টগুলির মধ্যে নিরপেক্ষ সিলিকন সিলান্ট প্রয়োগ করুন এবং কেসের মধ্যে তারগুলি প্রবেশ করতে কাফের চারপাশে সিল্যান্ট লাগান৷ আপনি অতিরিক্তভাবে গিয়ারবক্সের গিয়ারগুলিতে গ্রীস প্রয়োগ করতে পারেন, যেহেতু কারখানাটি কার্যত অনুপস্থিত। পর্যালোচনা অনুসারে, SHRUS-4 গ্রীস সবচেয়ে উপযুক্ত, লিথলের বিপরীতে, এটি ঠান্ডায় জমে না। উপরের গর্তটি সিল করার জন্য, আউটপুট শ্যাফ্টে একটি সিলিকন রিং স্থাপন করা যেতে পারে এবং শ্যাফ্টটিতে ইনস্টল করা অ্যাডাপ্টার থেকে চেমফারটি অবশ্যই সরিয়ে ফেলতে হবে, যাতে অতিরিক্ত ঘর্ষণ তৈরি না হয়।
আমি সমর্থনকারী বন্ধনীতে একটি আয়তক্ষেত্রাকার টেক্সোলাইট প্লেট সংযুক্ত করেছি, যার উপর আমি ডবল-পার্শ্বযুক্ত টেপ ব্যবহার করে সৌর ব্যাটারিটি আঠালো করে দিয়েছি। যেহেতু সার্ভোগুলি বেশিরভাগ সময় ডি-এনার্জাইজড থাকে, তাই সৌর অ্যারের মাধ্যাকর্ষণের প্রভাবে উচ্চতায় খাদটিকে ঘোরানো সম্ভব। এটি এড়াতে, আমি ক্যারিয়ার বন্ধনীর পাশে কোণ এবং প্লেট দিয়ে তৈরি লম্বা কাউন্টারওয়েট সংযুক্ত করেছি। কাউন্টারওয়েটগুলির ভর পরিবর্তন করে, আমি উচ্চতার ঘূর্ণনের অক্ষ বরাবর গঠনটিকে ভারসাম্যপূর্ণ করেছি।
ট্র্যাকার নির্দেশিকা সম্পাদন করে যখন সূর্য দিগন্তের উপরে থাকে, অর্থাৎ যখন এর উচ্চতা 0⁰ এর বেশি হয়। যখন সূর্য দিগন্তের নীচে অস্ত যায় (নেতিবাচক উচ্চতার মান), ট্র্যাকারটি সৌর অ্যারেকে পূর্ব দিকে নির্দেশ করে, সূর্যোদয়ের সময় আরও ট্র্যাকিং আবার শুরু হয়। আকাশের পুরো দৃশ্যমান অঞ্চলে ট্র্যাকিং করা হয়।
সূর্য ও নক্ষত্রের প্রতিদিনের গতিবিধি স্টেলারিয়াম প্রোগ্রামে একটি কম্পিউটারে দেখা যায়, এটি একটি বিনামূল্যের ভার্চুয়াল প্ল্যানেটেরিয়াম যা একটি বাস্তবসম্মত তারার আকাশ প্রদর্শন করে। প্রোগ্রামটি আকাশে আলোকসজ্জার গতিবিধি প্রদর্শন করে, আপনি যে কোনও সময় সূর্য এবং তারার অবস্থান দেখতে পারেন, বিভিন্ন স্থানাঙ্কের ডেটাও পাওয়া যায়।
আমি একটি মুদ্রিত সার্কিট বোর্ডে ডিভাইসটি মাউন্ট করেছি যা আমি GAINTA G1202G কেসের সাথে ফিট করার জন্য ডিজাইন করেছি। বোর্ডে একটি জাম্পার (জাম্পার) জন্য একটি জায়গা রয়েছে, যার সাহায্যে আপনি ডিজিটাল সূচকের শক্তি বন্ধ করতে পারেন।
ফিল্ড ইফেক্ট ট্রানজিস্টর VT1 IRLML2244, IRLML6402 দিয়ে প্রতিস্থাপন করা যেতে পারে। আপনি SOIC-8 প্যাকেজে ট্রানজিস্টরও ব্যবহার করতে পারেন (আপনাকে বোর্ডটি আবার করতে হবে): IRF9332, IRF9310, IRF9317।
নেতিবাচক তাপমাত্রায়, লি-আয়ন ব্যাটারিগুলি উল্লেখযোগ্য ক্ষমতা হারায় (ইলেক্ট্রোলাইট জমে যায়), +5 ⁰C এর নিচে তাপমাত্রায় ব্যাটারি ব্যবহার করার পরামর্শ দেওয়া হয় না, কারণ এটি সম্পদের অকাল হ্রাসের দিকে পরিচালিত করে। অতএব, আপনি যদি হিমশীতল আবহাওয়ায় ট্র্যাকারটি পরিচালনা করার পরিকল্পনা করেন তবে একটি LiFePO4 লিথিয়াম-আয়রন-ফসফেট ব্যাটারি ব্যবহার করা ভাল। এই ধরণের ব্যাটারিগুলি আরও হিম-প্রতিরোধী, অপারেটিং তাপমাত্রার পরিসীমা -30 ⁰C থেকে +55 ⁰C, সর্বাধিক ভোল্টেজ 3.65V, সর্বনিম্ন 2V, গড় 3.3V, অর্থাৎ লি-এর চেয়ে কম -আয়ন এছাড়াও, সুবিধার মধ্যে রয়েছে 3.2V এর কাছাকাছি একটি স্থিতিশীল স্রাব ভোল্টেজ। নিবন্ধের শেষে একটি ব্যাটারি অর্ডার করার জন্য লিঙ্ক রয়েছে, সেইসাথে চার্জ করার জন্য একটি মডিউল রয়েছে।
একটি সৌর ট্র্যাকারের ভিত্তিতে, আপনি একটি ছোট স্বায়ত্তশাসিত সিস্টেম তৈরি করতে পারেন যাতে বাহ্যিক শক্তির প্রয়োজন হয় না, যেমন একটি দূরবর্তী আবহাওয়া স্টেশন, বা গ্রীষ্মকালীন বাড়ির জন্য নিরাপত্তা ব্যবস্থা ইত্যাদি। আপনি সার্ভোগুলিকে আরও শক্তিশালী দিয়ে প্রতিস্থাপন করতে পারেন এবং একটি বড় সোলার প্যানেল ইনস্টল করতে পারেন। 12, 18V তে সোলার প্যানেলের জন্য সার্কিট মানিয়ে নেওয়া সম্ভব, বেশ কয়েকটি সিরিজ-সংযুক্ত ব্যাটারি চার্জ করার জন্য, তবে এর জন্য আপনাকে সার্কিট পরিবর্তন করতে হবে এবং অন্যান্য চার্জ মডিউল ব্যবহার করতে হবে।
একটি সোলার ট্র্যাকার একত্রিত করার জন্য মডিউল এবং উপাদানগুলি অর্ডার করার জন্য নীচে লিঙ্কগুলি রয়েছে:
সোলার ব্যাটারি 6V 4.5W
রিয়েল টাইম ক্লক মডিউল DS3231
MAX7219 ড্রাইভারে ডিজিটাল সূচক
TP4056 এ লি-আয়ন ব্যাটারি চার্জ মডিউল
ব্যাটারি LiFePO4 6500mah
ব্যাটারি LiFePO4 1800mah
LiFePO4 ব্যাটারি চার্জ মডিউল
সার্ভো MG996R
MG996R সার্ভোর জন্য Alt-অ্যাজিমুথ ইনস্টলেশন একত্রিত করার জন্য বন্ধনী
MT3608 এ বুস্ট কনভার্টার
![]()
![]()
![]()
![]()
![]()
![]()
শুরুতে, সোলার ট্র্যাকার দ্বারা এই নিবন্ধটি কী বোঝায় তা সম্ভবত বলার মতো। সংক্ষেপে, ডিভাইসটি একটি সৌর প্যানেলের জন্য একটি চলমান স্ট্যান্ড, যা প্রয়োজনীয় যাতে আমাদের নাতিশীতোষ্ণ অক্ষাংশে প্যানেলটি পর্যাপ্ত পরিমাণে আলো সংগ্রহ করে, সূর্যকে অনুসরণ করে তার অবস্থান পরিবর্তন করে।
এই ক্ষেত্রে, প্রোটোটাইপ সোলার ট্র্যাকারটি আরডুইনোর ভিত্তিতে একত্রিত হয়েছিল। অনুভূমিক এবং উল্লম্ব অক্ষগুলিতে প্ল্যাটফর্মটি ঘোরানোর জন্য, সার্ভো ড্রাইভগুলি ব্যবহার করা হয়, যার ঘূর্ণনের কোণটি ফটোরেসিস্টরগুলিতে আলোর ঘটনার শক্তির উপর নির্ভর করে। প্রত্যেকের প্রিয় সোভিয়েত ধাতু কনস্ট্রাক্টর শরীর হিসাবে ব্যবহৃত হয়।
এটি উল্লেখ করা দরকারী হবে যে এই সমস্ত একটি কোর্স প্রকল্প হিসাবে করা হয়েছিল, তাই আমি সৌর প্যানেল নিজেই এবং ব্যাটারি কেনা এবং মাউন্ট করতে বিরক্ত করিনি, যেহেতু তাদের উপস্থিতি ট্র্যাকারের কাজের সাথে সম্পর্কিত নয়। একটি অজুহাত হিসাবে, আমি বলতে পারি যে সোভিয়েত ধাতব কনস্ট্রাক্টরের সম্ভাবনাগুলি অপরিসীম, তাই ফোন চার্জ করার জন্য এটিতে একটি ছোট সোলার প্যানেল স্ক্রু করা কঠিন হবে না যদি এই ধরনের ইচ্ছা দেখা দেয়।
সুতরাং, সমাবেশে কি ব্যবহার করা হয়েছিল:
স্পিকার, যিনি হঠাৎ তালিকায় উপস্থিত হয়েছেন, তাকে উচ্চ-প্রযুক্তির প্রভাবকে উচ্চতর করার প্রয়োজন ছিল। আসল বিষয়টি হ'ল সার্ভোগুলি কেবল 180 ডিগ্রি ঘোরাতে পারে এবং আমাদের এর বেশি দরকার নেই, আমরা সূর্যকে অনুসরণ করছি। কিন্তু প্রকল্পটি পরীক্ষা করার সময়, যখন আপনি দুই মিনিটের প্রদর্শনের জন্য সত্যিই সূর্যকে অনুসরণ করতে পারবেন না, তখন দেখা গেল যে কোন সময়ে টর্চলাইট নাড়ানো বন্ধ করা মূল্যবান তা সংকেত দেওয়া ভাল, কারণ সার্ভো মৃতের কাছে পৌঁছেছে। মণ্ডল. এই জন্য, উপরের কল যোগ করা হয়.
তো, আসুন ট্র্যাকার সংগ্রহ করা শুরু করি। শুরু করার জন্য, কাজের আসন্ন সম্মুখভাগকে শর্তসাপেক্ষে চারটি ধাপে ভাগ করা যাক: সোলার প্যানেলের জন্য স্ট্যান্ড একত্রিত করা এবং সার্ভো মাউন্ট করা, একত্রিত কাঠামোতে আলো-সংবেদনশীল উপাদান সংযুক্ত করা, সোল্ডারিং এবং Arduino-এর জন্য কোড লেখা।
ফটোরেসিস্টরগুলি শরীরের সাথে বেশ সুরক্ষিতভাবে সংযুক্ত, একমাত্র জিনিস যা কাজ করার জন্য উপযুক্ত হবে তা হল প্ল্যাটফর্মে তাদের অবস্থানের নির্ভুলতা: এখন তারা যথেষ্ট লম্বভাবে তাকায় না, যা পারফেকশনিস্টদের বিরক্ত করতে পারে এবং ঘূর্ণনের নির্ভুলতাকে কিছুটা নষ্ট করতে পারে।
কিছুটা সার্কিট্রি: আলোক সংবেদনশীল উপাদানগুলির সংযোগ ভোল্টেজ বিভাজক সার্কিট অনুসারে পরিচালিত হয়, যার জন্য উপাদানগুলির তালিকায় নির্দেশিত আউটপুট প্রতিরোধকগুলির প্রয়োজন ছিল। সমস্ত ফটোরেসিস্টর আর্ডুইনোর পাঁচ-ভোল্ট পাওয়ার আউটপুটের সাথে সংযুক্ত একটি সাধারণ পিনের সাথে সোল্ডার করা হয়। সুবিধা এবং নান্দনিকতার জন্য, ফটোরেসিস্টরগুলির পা দুটি তিন-কোর উত্তাপযুক্ত তারের যোগাযোগের সাথে সোল্ডার করা হয় (একটি পরিচিতি অব্যবহৃত এবং লুকানো থাকে)। সমস্ত সার্কিটরি বিবরণ নীচের চিত্রে দেখা যাবে।




কোড
#অন্তর্ভুক্ত

"ব্যাং-ব্যাং" চ্যানেল দেখিয়েছে কিভাবে প্যানেলের জন্য ঘরে তৈরি সোলার ট্র্যাকার তৈরি করা যায়। তারা স্বয়ংক্রিয়ভাবে সূর্যের পরে ঘোরবে, বিদ্যুৎ কেন্দ্রের কার্যক্ষমতা বৃদ্ধি করবে।
আপনার প্রতিটি 3.5 ওয়াট ক্ষমতা সহ দুটি সোলার প্যানেল লাগবে। আউটপুটে, একটিতে 6 ভোল্টের বেশি থাকে, যা, যখন দুটি ব্যাটারি সিরিজে সংযুক্ত থাকে, তখন 12 ভোল্টের বেশি দেয়। পিছনে ইউএসবি সকেট। তিনটি ব্যাটারি সেগমেন্ট থেকে তিনটি আউটপুট। যার প্রতিটি 2 ভোল্ট উৎপন্ন করে। অর্থাৎ, প্রয়োজনে, আপনি সেই অনুযায়ী সংযোগ করতে পারেন এবং 2, 4, 6 ভোল্ট পেতে পারেন।

পরবর্তী গুরুত্বপূর্ণ নোড হল দুটি সার্ভো। একটি সৌর অ্যারেকে অনুভূমিকভাবে এবং অন্যটি উল্লম্বভাবে ঘোরবে। এই ড্রাইভগুলি সহজ নয়, এগুলি ঘোরানো এত সহজ নয়। কিছু উন্নতি প্রয়োজন। প্রতিটি ইঞ্জিনের সাথে সেটে প্লাস্টিকের ক্রস, ডিস্ক, বেঁধে রাখার জন্য স্ক্রু রয়েছে। ইঞ্জিনের জন্য কেনা বন্ধনী। এছাড়াও মাউন্ট স্ক্রু, ভারবহন এবং ডিস্ক অন্তর্ভুক্ত. চার্জ কন্ট্রোলার। এটি সোলার প্যানেল থেকে শক্তি গ্রহণ করবে এবং এটি ব্যাটারিতে স্থানান্তর করবে।
আসুন ইলেকট্রনিক ফিলিং দিয়ে আমাদের নিজের হাত দিয়ে কাজ শুরু করি। সোলার প্যানেলের জন্য ট্র্যাকার ডায়াগ্রামটি নীচে রয়েছে।  ওয়্যারিং ডায়াগ্রাম, বোর্ড, বোর্ড সম্পাদনা প্রোগ্রাম: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
ওয়্যারিং ডায়াগ্রাম, বোর্ড, বোর্ড সম্পাদনা প্রোগ্রাম: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
সার্কিটটি খুব সহজ এবং পুনরাবৃত্তি করা সহজ। এটি বেশ কয়েকটি প্রমাণিত বিকল্পের মধ্যে সবচেয়ে সফল। তবে তার লেখককেও একটু পরিবর্তন করতে হয়েছিল। আমাকে পরিবর্তনশীল এবং স্থির প্রতিরোধকের মান পরিবর্তন করতে হয়েছিল, একটি মুদ্রিত সার্কিট বোর্ড সার্কিট ডিজাইন করা হয়েছিল।
শুরু করার জন্য, আসুন বিশেষ কাগজে ট্র্যাকারের সার্কিট বোর্ডটি মুদ্রণ করি। এটি লেজার আয়রনিং প্রযুক্তি। কাগজ একটি চকচকে চেহারা আছে. বিপরীত দিকে, এটি স্বাভাবিক ম্যাট। আপনাকে চকচকে দিকে একটি লেজার প্রিন্টারে মুদ্রণ করতে হবে। লোহার সাথে যোগাযোগের পরে, এটিকে শীতল হতে দেওয়া উচিত এবং কাগজটি সহজেই স্তর থেকে বেরিয়ে আসে।

স্থানান্তর করার আগে, textolite degreased করা আবশ্যক। সূক্ষ্ম স্যান্ডপেপার ব্যবহার করা ভাল। আমরা প্যাটার্নটি বোর্ডে সংযুক্ত করি এবং 2 মিনিটের জন্য একটি গরম লোহা দিয়ে এটি লোহা করি।
এখন আপনাকে ট্র্যাকার বোর্ডটি খোদাই করতে হবে। অ্যামোনিয়াম পারসালফেট ব্যবহার করা যেতে পারে। রেডিও দোকানে বিক্রি। একই সমাধান বেশ কয়েকবার ব্যবহার করা যেতে পারে। ব্যবহারের আগে তরলটিকে 45 ডিগ্রিতে গরম করা বাঞ্ছনীয়। এটি এচিং প্রক্রিয়াটিকে ব্যাপকভাবে ত্বরান্বিত করবে। 20 মিনিট পরে, বোর্ড সফলভাবে সম্পন্ন হয়. এখন আপনাকে টোনারটি অপসারণ করতে হবে। আবার, স্যান্ডপেপার বা অ্যাসিটোন ব্যবহার করুন।
এখন আপনি বোর্ডে একটি গর্ত করতে পারেন। আপনি অংশ সোল্ডারিং শুরু করতে পারেন।
সোলার ট্র্যাকারের হার্ট হল lm324n অপারেশনাল এমপ্লিফায়ার। দুটি ট্রানজিস্টর টাইপ 41c, টাইপ 42c। একটি সিরামিক ক্যাপাসিটর 104. বিকাশের লেখক এসএমডি টাইপের সাথে অনেকগুলি বিবরণ প্রতিস্থাপন করেছেন। 5408 ডায়োডের পরিবর্তে, তাদের smd টাইপের অ্যানালগগুলি ব্যবহার করা হয়েছিল। মূল জিনিসটি কমপক্ষে 3 অ্যাম্পিয়ার ব্যবহার করা। 15 কিলো-ওহমের জন্য একটি প্রতিরোধক, 47 কিলো-ওহমের জন্য 1। দুটি ফটোরেসিস্টর। 100 এবং 10 কিলো-ওহমের জন্য 2 টিউনিং প্রতিরোধক। পরেরটি ফটো সেন্সরের সংবেদনশীলতার জন্য দায়ী।
 একটি হেলিওস্ট্যাট, বা অন্যথায়, একটি ট্র্যাকার হল সূর্যকে ট্র্যাক করার জন্য একটি যন্ত্র, আমাদের ক্ষেত্রে, সৌর প্যানেলগুলিকে ঘুরিয়ে দেওয়ার জন্য যাতে তারা সর্বদা সূর্যের সাথে লম্ব থাকে। এটি কোনও গোপন বিষয় নয় যে এই ক্ষেত্রেই সৌর প্যানেল সর্বাধিক শক্তি দেয়। উপরের চিত্রে, সৌর ট্র্যাকিং ডিভাইস (হেলিওস্ট্যাট) পালস নিয়ন্ত্রণ ব্যবহার করে এবং, কোনো মানবিক সহায়তা ছাড়াই, সৌর অ্যারেকে সর্বোত্তম আলোকসজ্জার দিকে পরিচালিত করতে সক্ষম।
একটি হেলিওস্ট্যাট, বা অন্যথায়, একটি ট্র্যাকার হল সূর্যকে ট্র্যাক করার জন্য একটি যন্ত্র, আমাদের ক্ষেত্রে, সৌর প্যানেলগুলিকে ঘুরিয়ে দেওয়ার জন্য যাতে তারা সর্বদা সূর্যের সাথে লম্ব থাকে। এটি কোনও গোপন বিষয় নয় যে এই ক্ষেত্রেই সৌর প্যানেল সর্বাধিক শক্তি দেয়। উপরের চিত্রে, সৌর ট্র্যাকিং ডিভাইস (হেলিওস্ট্যাট) পালস নিয়ন্ত্রণ ব্যবহার করে এবং, কোনো মানবিক সহায়তা ছাড়াই, সৌর অ্যারেকে সর্বোত্তম আলোকসজ্জার দিকে পরিচালিত করতে সক্ষম।
হেলিওস্ট্যাট সার্কিটে একটি ঘড়ি জেনারেটর (DD1.1, DD1.2), দুটি ইন্টিগ্রেটিং সার্কিট (VD1R2C2, VD2R3C3), একই সংখ্যক শেপার (DD1.3, DD1.4), একটি ডিজিটাল তুলনাকারী (DD2), দুটি ইনভার্টার (DD1. 5, DD1.6) এবং একটি ট্রানজিস্টর সুইচ (VT1-VT6) বৈদ্যুতিক মোটর M1-এর ঘূর্ণনের দিকনির্দেশের জন্য, যা প্ল্যাটফর্মের ঘূর্ণন নিয়ন্ত্রণ করে যেটিতে সোলার ব্যাটারি ইনস্টল করা আছে। পাওয়ার অন থাকলে, DD1.1, DD1.2 উপাদানগুলির জেনারেটর ঘড়ির স্পন্দন তৈরি করে যা প্রায় 300 Hz এর ফ্রিকোয়েন্সিতে অনুসরণ করে। যখন ডিভাইসটি চালু থাকে, তখন ইনভার্টার DD1.3, DD1.4 এবং ইন্টিগ্রেটিং সার্কিট VD1R2C2, VD2R3C3 দ্বারা উত্পন্ন ডালের সময়কাল তুলনা করা হয়। তাদের খাড়াতা একীকরণ সময়ের ধ্রুবকের উপর নির্ভর করে পরিবর্তিত হয়, যা ফলস্বরূপ, ফটোডিওড VD1 এবং VD2 এর আলোকসজ্জার উপর নির্ভর করে (ক্যাপাসিটার C2 এবং C3 এর চার্জিং কারেন্ট তাদের আলোকসজ্জার সমানুপাতিক)। ইন্টিগ্রেটিং সার্কিটগুলির আউটপুটগুলি থেকে সংকেতগুলি লেভেল শেপারগুলি DD1.3, DD1.4 এবং তারপরে DD2 মাইক্রোসার্কিটের উপাদানগুলির উপর তৈরি একটি ডিজিটাল তুলনাকারীকে খাওয়ানো হয়। তুলনাকারীর সাথে ডাল ইনপুটের সময়কালের অনুপাতের উপর নির্ভর করে, DD2.3 (পিন 11) বা DD2.4 (পিন 4) উপাদানটির আউটপুটে একটি নিম্ন-স্তরের সংকেত উপস্থিত হয়। ফটোডিওডের সমান আলোকসজ্জার সাথে, তুলনাকারীর উভয় আউটপুটে উচ্চ-স্তরের সংকেত উপস্থিত থাকে। ট্রানজিস্টর VT1 এবং VT2 নিয়ন্ত্রণ করতে ইনভার্টার DD1.5 এবং DD1.6 প্রয়োজন। প্রথম বৈদ্যুতিন সংকেতের মেরু বদল-এর আউটপুটে একটি উচ্চ সংকেত স্তর ট্রানজিস্টর VT1 খোলে, দ্বিতীয় - VT2-এর আউটপুটে। এই ট্রানজিস্টরগুলির লোডগুলি শক্তিশালী ট্রানজিস্টর VT3, VT6 এবং VT4, VT5 এর চাবি, যা বৈদ্যুতিক মোটর M1 এর সরবরাহ ভোল্টেজ পরিবর্তন করে। R4C4R6 এবং R5C5R7 সার্কিট কন্ট্রোল ট্রানজিস্টর VT1 HVT2 এর বেসে ঢেউ মসৃণ করে। বিদ্যুতের উত্সের সাথে সংযোগের মেরুতার উপর নির্ভর করে মোটরের ঘূর্ণনের দিক পরিবর্তন হয়। ডিজিটাল তুলনাকারী সমস্ত কী ট্রানজিস্টরকে একই সময়ে খুলতে দেয় না এবং এইভাবে সিস্টেমের উচ্চ নির্ভরযোগ্যতা নিশ্চিত করে।
সকালে সূর্যোদয়ের সাথে সাথে, ফটোডিওডস VD1 এবং VD2 এর আলোকসজ্জা আলাদা হবে এবং বৈদ্যুতিক মোটর সৌর প্যানেলটিকে পশ্চিম থেকে পূর্ব দিকে ঘুরতে শুরু করবে। শেপারগুলির ডালগুলির সময়কালের পার্থক্য হ্রাসের সাথে সাথে ফলস্বরূপ পালসের সময়কাল হ্রাস পাবে এবং সৌর ব্যাটারির ঘূর্ণনের গতি ধীরে ধীরে হ্রাস পাবে, যা সূর্যের মধ্যে এর সঠিক অবস্থান নিশ্চিত করবে। এইভাবে, পালস নিয়ন্ত্রণের সাথে, মোটর শ্যাফ্টের ঘূর্ণনটি গিয়ারবক্স ব্যবহার না করেই সৌর ব্যাটারি দিয়ে সরাসরি প্ল্যাটফর্মে প্রেরণ করা যেতে পারে। দিনের বেলায়, সূর্যের গতিবিধির সাথে সৌর প্যানেলের প্ল্যাটফর্মটি ঘুরবে। গোধূলি শুরু হওয়ার সাথে সাথে, ডিজিটাল তুলনাকারীর ইনপুটে ডালের সময়কাল একই হবে এবং সিস্টেমটি স্ট্যান্ডবাই মোডে চলে যাবে। এই অবস্থায়, ডিভাইস দ্বারা গ্রাস করা বর্তমান 1.2 mA অতিক্রম করে না (অভিযোজন মোডে, এটি মোটর শক্তির উপর নির্ভর করে)।
যদি নকশাটি একটি অনুরূপ স্কিম অনুসারে একত্রিত উল্লম্ব প্রতিচ্ছবি ব্লকের সাথে সম্পূরক হয়, তবে উভয় প্লেনে ব্যাটারির অভিযোজন সম্পূর্ণরূপে স্বয়ংক্রিয় করা সম্ভব। যদি হঠাৎ ডায়াগ্রামে নির্দেশিত কোনও মাইক্রোসার্কিট না থাকে তবে সেগুলিকে K564, K176 সিরিজের মাইক্রোসার্কিট দিয়ে প্রতিস্থাপন করা যেতে পারে (5 ... 12 V এর সরবরাহ ভোল্টেজ সহ)। ট্রানজিস্টর KT315A KT201, KT315, KT342, KT3102 সিরিজ, এবং KT814A - যেকোনও KT814, KT816, KT818 সিরিজের সাথে সাথে জার্মেনিয়াম P213-P215, P217-এর সাথে বিনিময়যোগ্য। পরবর্তী ক্ষেত্রে, 1 ... 10 kOhm এর প্রতিরোধের প্রতিরোধকগুলিকে ট্রানজিস্টর VT3-VT6 এর নির্গমনকারী এবং বেসের মধ্যে সংযুক্ত করা উচিত যাতে একটি উল্লেখযোগ্য বিপরীত কারেন্টের কারণে তাদের দুর্ঘটনাজনিত খোলার প্রতিরোধ করা হয়। ফটোডিওডস FD256 এর পরিবর্তে, আপনি সৌর কোষ থেকে টুকরো (পোলারিটির সাথে সংযুক্ত), বায়াস সার্কিট ছাড়া ফটোট্রান্সিস্টর, সেইসাথে ফটোরেসিস্টর, উদাহরণস্বরূপ, SF2, SFZ বা FSK যেকোন পরিবর্তন করতে পারেন। ডিজিটাল তুলনাকারীর নির্ভরযোগ্য ক্রিয়াকলাপ অনুসারে ঘড়ি জেনারেটরের ফ্রিকোয়েন্সি (রোধকারী R1 এর প্রতিরোধের পরিবর্তন করে) নির্বাচন করা কেবলমাত্র প্রয়োজনীয়। একটি সবুজ আলো ফিল্টার অত্যধিক বিকিরণ থেকে photodiodes রক্ষা করতে ব্যবহার করা হয়. ফটো সেন্সরগুলির মধ্যে একটি অস্বচ্ছ পর্দা স্থাপন করা হয়। এটি বোর্ডের সাথে লম্বভাবে এমনভাবে স্থির করা হয়েছে যে যখন আলোকসজ্জার কোণ পরিবর্তিত হয়, তখন এটি ফটোডিওডগুলির একটিকে অস্পষ্ট করে। 










