Sangat sering, panel surya dipasang secara kaku dan permanen. Ini sederhana, tetapi tidak terlalu efisien, karena pada siang hari matahari bergerak melintasi langit dan jumlah energi cahaya yang diterima oleh panel surya berubah. Pengembalian maksimum baterai surya hanya mungkin jika cahaya jatuh pada panel tegak lurus terhadap bidangnya. Agar sinar matahari yang jatuh pada panel surya selalu tegak lurus. sistem pelacakan surya desain yang berbeda dan tingkat kompleksitas yang berbeda digunakan. Meskipun sistem seperti itu mempersulit pemasangan panel surya, ini memungkinkan Anda untuk mengambil yang maksimal darinya. Panel surya masih tidak murah, dan kami, dengan berinvestasi di dalamnya, tentu ingin mewujudkan potensi penuhnya.
Seringkali sistem pelacakan paling sederhana hanya dapat memutar panel dalam satu sumbu. Perangkat tersebut mencakup sepasang sensor foto dan sepasang pembanding yang mengontrol satu motor listrik yang termasuk dalam diagonal jembatan-H paling sederhana. Perangkat semacam itu, tentu saja, juga meningkatkan efisiensi panel surya, tetapi mereka tidak melakukannya dengan sangat efisien, karena hanya bekerja dalam satu sumbu. Artikel ini menjelaskan sistem pelacakan surya yang sangat sederhana, yang, bagaimanapun, dapat menggerakkan panel dalam dua sumbu, yang meningkatkan efisiensi susunan surya. Selama operasi, sistem terus-menerus mencoba memposisikan panel agar bidangnya selalu tegak lurus terhadap sinar matahari yang datang dan untuk mendapatkan pengembalian listrik maksimum dari baterai. Alat pelacak mengikuti matahari dari fajar hingga sinar terakhir matahari terbenam dan secara otomatis melanjutkan pekerjaannya keesokan paginya.
Diagram perangkat berisi chip LM339, yang merupakan empat pembanding analog dalam satu paket umum. Dua motor dikendalikan oleh sirkuit mikro L293D khusus - jembatan-H ganda. Selain sirkuit mikro, diagram sirkuit berisi beberapa elemen diskrit. Fotoresistor LDR1 - LDR4 digunakan sebagai sensor intensitas cahaya.Fotoresistor ini menentukan posisi panel surya relatif terhadap sinar matahari.
Blok fotoresistor bersama dengan komparator LM339 menghasilkan sinyal kontrol untuk driver motor L293D. Fotoresistor LDR1 dan LDR2 dipasang di sudut-sudut panel surya pada sumbu X, di LDR3 dan LDR4 - pada sumbu Y. level tegangan rendah.
Pertimbangkan algoritma kerja sistem pada contoh bagiannya yang bertanggung jawab untuk bergerak sepanjang sumbu X. Jika fotoresistor LDR2 menerima lebih banyak cahaya daripada LDR1, maka resistansi LDR2 menjadi lebih kecil daripada resistansi LDR1. Level tegangan yang lebih tinggi muncul pada input komparator A1 dan A2 (4, 7). Dalam hal ini, level tegangan tinggi muncul pada output komparator A2 (1). Motor M1 mulai berputar di salah satu arah (katakanlah, berlawanan arah jarum jam), memutar panel surya.
Jika LDR1 menerima lebih banyak cahaya daripada LDR2, maka resistansinya menjadi lebih kecil daripada resistansi LDR2, sehingga mengurangi tegangan pada input komparator (4, 7). Pada output (2) komparator A2, level tinggi muncul dan motor mulai berputar ke arah yang berlawanan (katakanlah, searah jarum jam). Pelacakan di sepanjang sumbu Y bekerja dengan cara yang persis sama.
Gambar di bawah menunjukkan kemungkinan desain sistem pelacakan surya. Sirkuit dapat dirakit pada papan tempat memotong roti terpadu atau papan sirkuit cetak konvensional dapat diarahkan untuk itu.
Setelah penggunaan panel surya untuk produksi listrik pada skala industri, para insinyur dan desainer mulai mencari cara untuk meningkatkan efisiensi pembangkit listrik tersebut. Dispersi total cahaya matahari, yang ditentukan oleh perubahan arah jatuhnya sinar matahari pada fotosel, tidak memungkinkan penggunaan panel surya secara efisien sepanjang siang hari. Jalan keluar dari situasi ini ditemukan cukup cepat - panel surya mulai dipasang di pangkalan bergerak yang terhubung ke sistem pelacakan surya.
Seperti yang Anda ketahui, untuk mendapatkan daya maksimum dari panel surya, sinar matahari harus mengenai bidang baterai secara tegak lurus. Dengan arah pancaran ini, efisiensi panel surya bisa mencapai 50-55%. Untuk baterai yang dipasang secara permanen, angka ini dapat dikurangi menjadi 10-15% karena perubahan sudut datangnya sinar matahari.
Perangkat pelacak surya terdiri dari dua bagian utama:
1. Skema kontrol, yang menentukan posisi Matahari. Diagram paling sederhana dari alat pelacak surya atau pelacak (Solar Tracker) ditunjukkan di bawah ini. Untuk menentukan posisi Matahari, digunakan dua buah photoresistor. Skema tersebut meliputi:
- chip penguat operasional LM1458 (K140UD20);
- transistor BD139 (KT815G, KT961A) dan BD140 (KT814G, KT626V);
- fotoresistor;
- dioda 1N4004 (KD243G);
- resistor dan resistor tuning.

2. Mekanisme untuk memutar dan memiringkan baterai tergantung dari arah datangnya sinar matahari. Mekanisme kemiringan memungkinkan penggunaan sistem pelacakan seperti itu di setiap garis lintang geografis: saat memasang panel surya di area yang sesuai dengan 320 garis lintang utara, sumbu perangkat harus diputar 320 relatif terhadap cakrawala. Penggerak semua mekanisme sistem pelacakan dibangun berdasarkan motor listrik, yang dipengaruhi oleh sistem kontrol. Motor listrik dan sistem kontrol ditenagai oleh panel surya itu sendiri, sehingga instalasi semacam itu bersifat otonom.
Seperti yang Anda lihat, skema dan perangkat pelacak surya cukup sederhana. Secara alami, sistem yang lebih kompleks digunakan pada skala industri, tetapi skema serupa dapat dipasang secara independen untuk instalasi rumah tangga untuk produksi listrik berdasarkan panel surya.

Jaringan berisi sejumlah besar skema dan solusi siap pakai untuk sistem pelacakan surya. Jadi, jika ada kebutuhan untuk memperbaiki desain panel surya dan meningkatkan kinerjanya, selalu ada kesempatan untuk melakukannya sendiri.
Pelacak surya adalah sistem elektronik-mekanis yang dirancang untuk mengarahkan panel surya ke Matahari. Sistem melacak posisi Matahari di langit dan mengontrol servo yang memutar panel ke arah yang sesuai. Penggunaan pelacak semacam itu memungkinkan Anda untuk mendapatkan kinerja maksimum dari panel surya.
Sebagian besar pelacak buatan sendiri yang ditemukan di Internet dirakit di Arduino, sensor foto digunakan untuk menentukan posisi Matahari. Bergantung pada tingkat iluminasi dan posisi relatif sensor foto, belokan dilakukan ke arah iluminasi maksimum. Metode ini memiliki kelemahan: tidak diketahui bagaimana sistem akan berperilaku dalam cuaca mendung; kekebalan kebisingan rendah dalam hal respons terhadap cahaya bulan dan sumber cahaya terang, serta awan individu.
Karena kelemahan di atas, saya mengembangkan versi saya sendiri dari pelacak surya bertenaga servo ekonomis yang menyediakan pelacakan Matahari di seluruh langit yang terlihat kapan saja, terlepas dari lokasi geografis.
Posisi Matahari di langit dapat ditentukan tidak hanya oleh iluminasi sensor foto, tetapi juga oleh rumus mekanika langit berdasarkan koordinat geografis titik pengamatan dan waktu yang tepat. Sekarang akan ada banyak definisi dan rumus yang terkait dengan mekanika langit, jadi bersiaplah untuk memperumit lilitan Anda). Untuk mengarahkan panel surya, Anda perlu menentukan koordinat horizontal Matahari, ini adalah ketinggian dan azimuth. Pusat sistem koordinat ini bertepatan dengan lokasi pengamat, perhitungan dilakukan relatif terhadap bidang cakrawala matematika.
Tinggi h adalah sudut antara bidang alas. cakrawala dan arah ke termasyhur, dihitung dari 0⁰ hingga +90 hingga zenit, dan dari 0⁰ hingga -90⁰ hingga nadir.
Azimuth A - sudut antara garis tengah hari (secara kasar, arah ke selatan) dan garis perpotongan bidang matras. cakrawala dengan bidang lingkaran vertikal termasyhur. Itu dihitung dari titik selatan ke arah rotasi harian bola langit dalam 0⁰ ... 360⁰, atau dari 0⁰ hingga +180⁰ ke barat dan dari 0⁰ hingga 180⁰ ke timur. Koordinat horizontal bintang terus berubah, karena rotasi harian Bumi.
Di bawah ini adalah rumus untuk menghitung tinggi dan azimuth termasyhur:
h = asin (sinδ sinϕ + cosδ cosϕ biaya);
A = atan2 (cos
di mana adalah deklinasi bintang, t adalah sudut jam bintang, adalah garis lintang titik pengamatan (0⁰…+90⁰ untuk belahan bumi utara, 0⁰…-90⁰ untuk selatan, 0⁰ adalah ekuator).
Dekripsi fungsi atan2(y, x): 
Seperti yang Anda lihat, untuk menghitung koordinat horizontal, perlu untuk menghitung deklinasi dan sudut jam bintang. Koordinat ini mengacu pada sistem koordinat ekuator pertama, di mana bidang utama adalah bidang ekuator langit.
Deklinasi - sudut antara bidang ekuator langit dan arah ke termasyhur, diukur dari 0⁰ hingga +90⁰ menuju kutub utara, dan dari 0⁰ hingga -90⁰ menuju kutub selatan.
Sudut per jam t adalah sudut dihedral antara bidang meridian langit dan lingkaran deklinasi termasyhur. Itu dihitung dalam arah rotasi harian bola langit, di sebelah barat titik atas ekuator langit, dalam 0⁰ ... 360⁰, atau dari 00:00 hingga 24:00 (setiap jam). Juga, sudut jam dapat diukur dari 0⁰ hingga 180⁰ (dari 00:00 hingga 12:00) ke barat dan dari 0⁰ hingga 180⁰ (dari 00:00 hingga -12:00) ke timur. Sudut jam sama dengan 0 pada saat kulminasi atas bintang, untuk Matahari pada siang hari yang sebenarnya (tidak selalu waktu yang sama ketika jam menunjukkan pukul 12:00 waktu setempat).
Deklinasi Matahari berubah sepanjang tahun (tidak merata) dari -23,43⁰ menjadi +23,43⁰, karena gerakan orbit Bumi mengelilingi Matahari, dan tidak terkait dengan rotasi harian Bumi. Untuk menentukan deklinasi Matahari untuk setiap hari dalam setahun, cara termudah adalah dari tabel nilai deklinasi rata-rata untuk siklus 4 tahun. Tabel dapat diunduh di akhir artikel.
Sudut jam bintang berubah pada siang hari (karena rotasi harian Bumi), dapat dihitung, mengetahui waktu matahari yang sebenarnya:
t \u003d Ts.ist - 12:00 h, (-12:00 ... + 11:59),
di mana Ts.ist adalah waktu matahari sebenarnya (00:00…23:59h).
Waktu matahari sebenarnya dapat dihitung dengan mengetahui waktu setempat, zona waktu dan garis bujur dari titik pengamatan:
Ts.ist = Ts.av + EOT, atau Ts.ist = UTC + + EOT,
di mana Ts.av adalah waktu matahari rata-rata di beberapa titik di Bumi (tergantung pada bujur titik), UTC adalah waktu terkoordinasi universal, adalah bujur titik pengamatan dalam satuan jam, EOT adalah persamaan waktu.
Waktu Universal Terkoordinasi dapat dihitung dari waktu lokal (Tm) dan zona waktu (N): UTC = Tm – N. Bujur lokasi diukur dari 0⁰ hingga 180⁰ timur meridian utama (bujur Timur), dan dari 0⁰ hingga -180⁰ ke arah barat (bujur barat). Saat mensubstitusikan ke rumus di atas, bujur harus dikonversi ke satuan jam (1⁰ = 4 menit).
Persamaan waktu EOT menunjukkan perbedaan antara waktu matahari rata-rata dan waktu matahari sebenarnya, karena pergerakan harian Matahari tidak merata karena elips orbit Bumi, serta kemiringan sumbu Bumi terhadap bidang ekliptika:
EOT = 9,87 sin2B - 7,53 cosB - 1,5 sinB,
di mana B = (360⁰ (N-81))/365, N adalah nomor urut hari dalam setahun.
Dengan demikian, sepanjang tahun, nilai persamaan waktu berubah dari -14,3 menit menjadi +16.4 menit.
Di bawah ini adalah grafik bagaimana persamaan waktu berubah selama setahun: 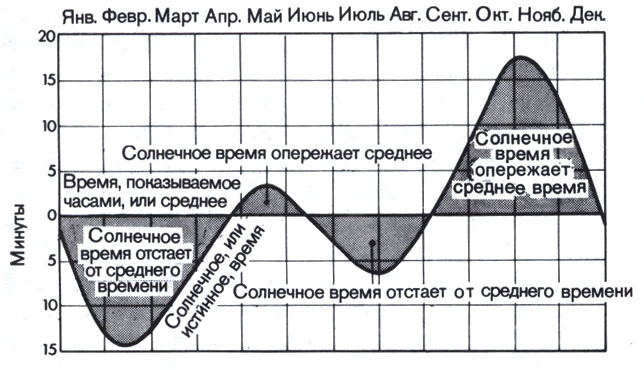
Saya harus mengarahkan semua perhitungan ini ke dalam program mikrokontroler, saya tidak berani menulis di assembler, jadi saya mulai belajar SI, saya harus mengutak-atik rumus dan perhitungan selama berminggu-minggu untuk mendapatkan hasil yang tepat, mempelajari SI sepanjang jalan. Hasilnya, saya berhasil menulis program kerja, sementara kesalahan perhitungan tidak melebihi ±1⁰.
Pelacak surya dirancang untuk baterai surya kecil dengan daya 2W dan tegangan 6V untuk mengisi baterai lithium-ion, tetapi lebih baik menggunakan baterai yang lebih kuat setidaknya 4W. Sebagai penggerak listrik, saya menggunakan servos MG996R (Anda dapat membeli di China, tautannya diberikan di akhir artikel). Selain itu, saya membeli tanda kurung khusus untuk merakit instalasi alt-azimuth (tautan untuk memesan di akhir artikel). Desain rakitan memungkinkan Anda untuk mengarahkan baterai surya pada ketinggian dan azimuth, sedangkan servo azimuth tidak bergerak dan memutar servo ketinggian bersama dengan tanda kurung.
Di bawah ini adalah diagram pelacak surya: ![]()
Sirkuit ini didasarkan pada mikrokontroler PIC16F876A, yang memiliki sejumlah besar memori dan berisi banyak modul periferal. Seluruh struktur ditenagai oleh baterai Li-ion, yang diisi daya dari baterai surya melalui modul berdasarkan chip TP4056, ini adalah pengontrol muatan khusus untuk baterai Li-ion (tautan pemesanan di akhir artikel) . Untuk menentukan waktu dan tanggal saat ini, skema menggunakan modul (tautan untuk pemesanan di akhir artikel). Jamnya cukup akurat, selisih waktu ± 2 menit per tahun, saya sudah menulis artikel terperinci tentang mereka, mereka yang ingin dapat membiasakan diri. Untuk menampilkan parameter, indikator digital digunakan (tautan untuk pemesanan di akhir artikel).
Tegangan maksimum pada baterai Li-ion tidak melebihi 4.1V, yang tidak cukup untuk memberi daya pada servos, sehingga modul step-up berdasarkan chip MT3608 telah ditambahkan ke sirkuit (tautan pesanan di akhir artikel ). Tegangan input minimum modul adalah 2V, arus beban maksimum adalah 2A, modul memiliki resistor variabel multi-putaran untuk menyesuaikan tegangan output. Untuk menghemat energi, daya ke servos tidak terus-menerus disuplai, tetapi hanya untuk mengubah posisi poros. Daya diaktifkan menggunakan transistor efek medan p-channel VT1, modul konverter juga dikendalikan dari mikrokontroler.
Papan modul tidak menyediakan kontak untuk kontrol, jadi perlu untuk menyolder kabel tambahan ke pin ke-4 chip MT3608, ini adalah input on / off konverter. Di papan, pin ini terhubung ke catu daya "+", pertama-tama Anda harus memotong trek yang cocok untuk pin ini (untuk ini Anda harus melepas solder sirkuit mikro), atau menaikkan pin di atas papan. Chip resistor pembagi tegangan dipasang di papan modul, meningkatkan resistansi resistor ini juga akan mengurangi konsumsi dalam mode tidur, saya menggantinya dengan yang lain, dengan resistansi 9,1 kOhm, awalnya 2,2 kOhm. Setelah penggantian, Anda perlu mengatur tegangan output menjadi sekitar 5-5.5V untuk memberi daya pada servos, gambar di bawah ini: 
Modul jam juga perlu ditingkatkan, untuk mengurangi konsumsi daya, Anda perlu menyolder chip memori 24c32, LED "DAYA", serta resistor (200 Ohm), di mana tegangan suplai eksternal disuplai ke baterai , mengapa orang Cina melakukan ini tetap tidak dapat dipahami, karena baterai tidak dimaksudkan untuk diisi, lihat gambar di bawah ini: 
LED HL1 diatur untuk menunjukkan kesalahan komunikasi dengan jam DS3231 (melalui antarmuka I2C), LED mulai berkedip jika tidak ada respons dari jam.
Perakitan pengaturan alt-azimuth harus dimulai ketika servos diatur ke posisi tengah, ini terjadi ketika perangkat pertama kali dihidupkan, indikator akan menunjukkan tulisan "Cent". Diinginkan untuk memasang servo azimuth pada pelat yang akan berfungsi sebagai dasar pemasangan, atau pada dudukan, sehingga poros keluaran diarahkan secara vertikal ke atas. Selanjutnya, Anda perlu memasang braket servo tinggi, pertama-tama Anda harus memasang selongsong geser ke braket, lalu selongsong adaptor. Braket harus dipasang tegak lurus dengan sisi panjang servo azimuth, seperti yang ditunjukkan pada foto: 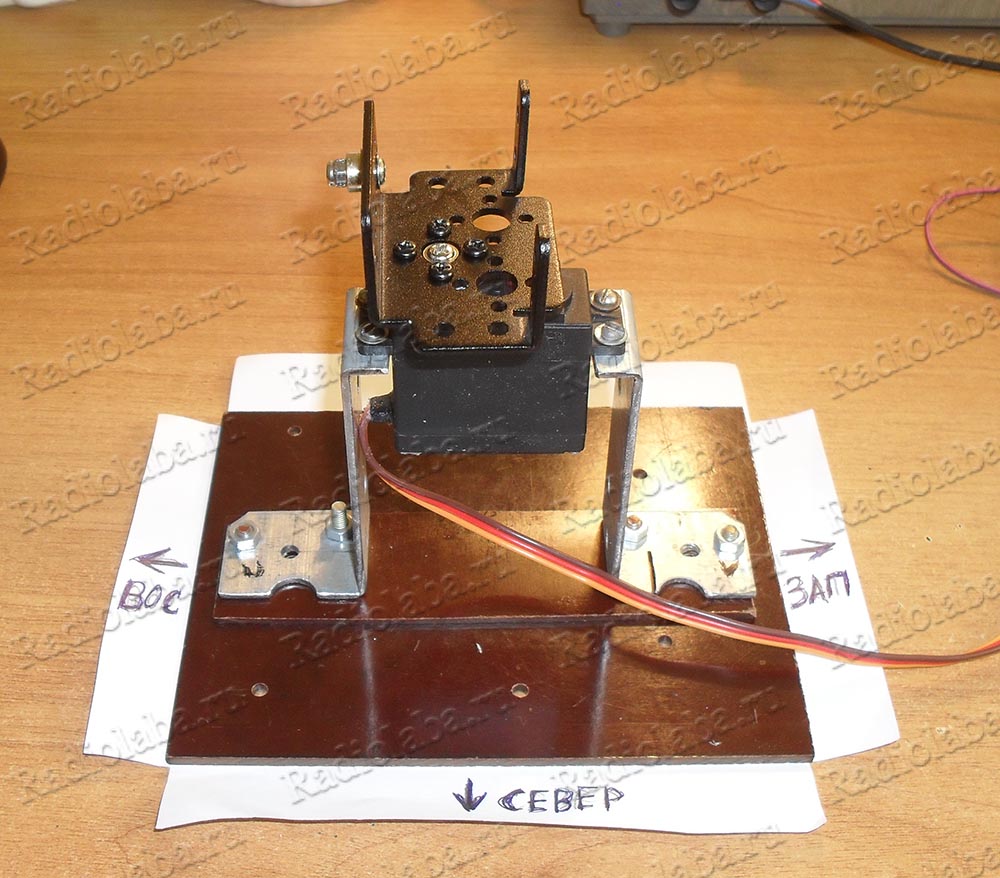
Saat merakit, sulit untuk mencapai posisi tegak lurus, tetapi ini tidak perlu, penyimpangan dalam ± 5-10 derajat dapat diterima. Di masa depan, penyesuaian perangkat lunak akan menghilangkan penyimpangan ini.
Setelah memperbaiki servo ketinggian, tetap kencangkan braket pembawa, coba pertama-tama selongsong adaptor pada poros servo, pilih posisi sehingga braket pembawa setelah pemasangan diarahkan secara vertikal ke atas. Sekali lagi, tidak perlu mengatur posisi yang tepat, seperti yang saya katakan sebelumnya. Tampilan umum instalasi ditunjukkan pada foto berikut: 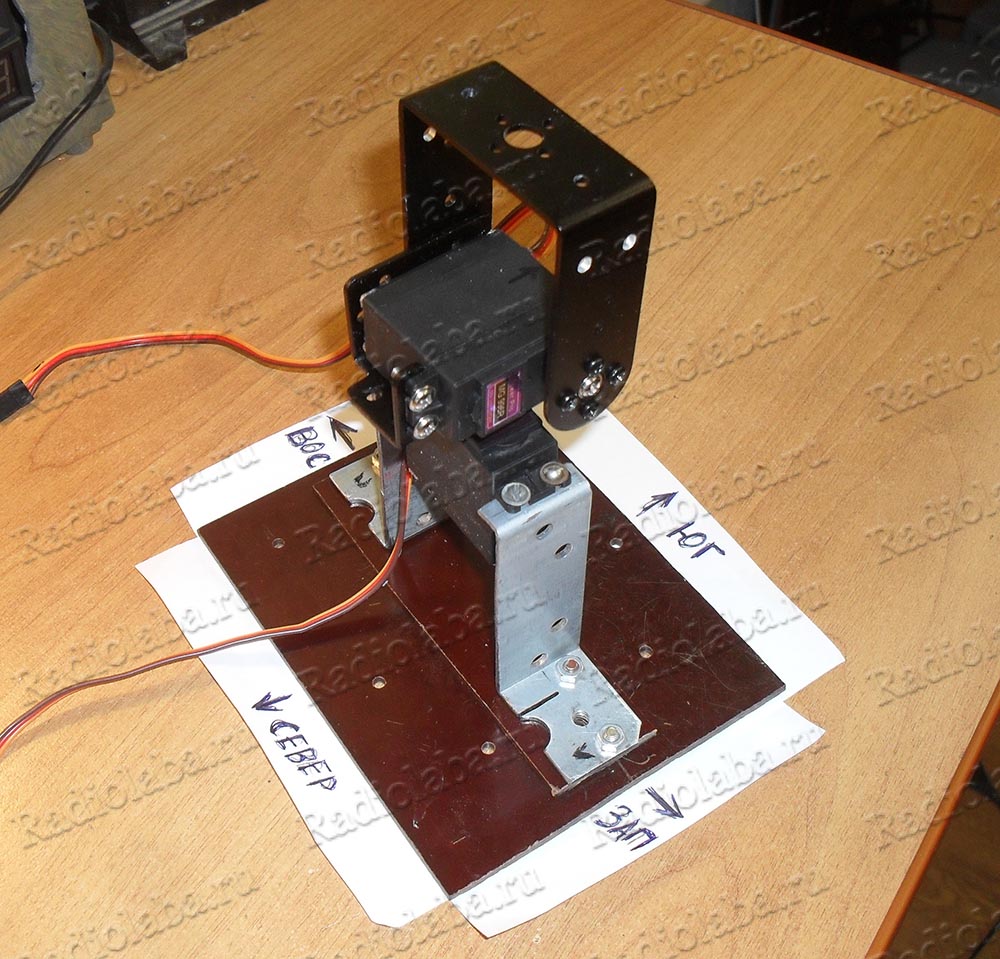
Berikut ini adalah prosedur untuk menyetel posisi ekstrim dari servos. Penyesuaian harus dilakukan pada permukaan yang rata, ketika poros servo vertikal azimut (sumbu rotasi diarahkan sepanjang garis tegak lurus). Setelah menekan tombol "Enter", braket pendukung berputar ke arah Utara bersyarat dan mengambil posisi horizontal (tulisan "utara" ditampilkan pada indikator): 
Jika ada penyimpangan dari horizontal, maka Anda perlu menyesuaikan posisi braket menggunakan tombol "Set" dan "Discharge". Dengan demikian, posisi ekstrim servo disesuaikan. Selanjutnya, ketika tombol "Enter" ditekan, braket berputar ke arah Selatan bersyarat (Selatan tertulis pada indikator). Jika perlu, sesuaikan posisi horizontal braket seperti dijelaskan di atas.
Menekan tombol "Enter" lebih lanjut akan memutar lengan ke arah Timur konvensional (pada indikator ada tulisan TIMUR). Tombol "Set" dan "Discharge" mengoreksi arah, sementara nyaman untuk fokus pada bodi drive servo azimuth, braket perlu diarahkan di sepanjang sisi panjang bodi, jika dilihat dari atas: 
Lain kali Anda menekan tombol "Enter", braket akan berputar ke arah Barat (indikator menunjukkan tulisan BARAT), penyesuaian dilakukan seperti dijelaskan di atas.
Sebagai hasil dari koreksi, braket diputar dalam ketinggian dan azimut dalam 180⁰, nilai koreksi disimpan dalam memori EEPROM mikrokontroler. Setelah menekan tombol "Enter", braket akan mengambil arah yang dikoreksi ke Selatan bersyarat. Untuk orientasi baterai surya yang benar, arah ke Selatan bersyarat harus menunjukkan titik sebenarnya dari Selatan di area yang diberikan, dan poros penggerak servo di azimuth terletak secara vertikal di sepanjang garis tegak lurus.
Setelah menekan tombol "Enter" lagi, waktu, tanggal, zona waktu, koordinat lokasi, dan durasi mode tidur harus diatur. Dengan demikian, untuk setiap parameter, prasasti berikut ditampilkan pada indikator:
– waktu lokal, secara default 0 jam 0 menit;
– bujur lokasi, secara default -0 derajat. 0 menit (untuk bujur barat, tanda minus "-" diletakkan);
– lintang lokasi, secara default -0 derajat. 0 menit (untuk garis lintang selatan, tanda minus "-" diletakkan);
– zona waktu, secara default -0, (untuk bujur barat tanda minus “-” diletakkan);
– durasi mode tidur, default 1 menit.
Tombol "Discharge" dan "Set" mengatur nilai parameter, ketika tombol "Enter" ditekan, nilai waktu dan tanggal ditulis ke , parameter lainnya disimpan dalam memori EEPROM mikrokontroler. Setelah memasukkan semua parameter, indikator menampilkan tulisan SUCCES (selama 1 detik, kemudian indikator padam), kemudian instalasi ditujukan ke Matahari, sesuai dengan parameter yang dimasukkan.
Untuk menghemat energi, membidik Matahari dilakukan setelah jangka waktu tertentu, yang diatur dalam parameter durasi mode Tidur. Setelah menunjuk, servos dihilangkan energinya, mikrokontroler masuk ke mode tidur, konsumsi total pelacak dikurangi menjadi 160 A. Durasi "tidur" dapat diatur dalam 1-255 menit.
Ketika pelacak dihidupkan kembali (setelah mematikan daya), memori EEPROM diperiksa terlebih dahulu, jika parameter yang disimpan benar, pelacak terus melacak Matahari, sementara indikator digital tetap dalam mode tidur dan tidak menyala menghemat energi. Anda biasanya dapat mematikan daya indikator setelah input awal parameter. Untuk masuk kembali ke mode koreksi, Anda harus menahan tombol "Set" dan menyalakan pelacak. Jika parameter yang dibaca dari EEPROM salah atau hilang, itu juga akan masuk ke mode koreksi.
Saya juga menambahkan fungsi keluaran parameter utama melalui antarmuka UART ke program mikrokontroler. Setelah menghitung posisi Matahari, mikrokontroler mentransmisikan nilai saat ini dari waktu, tanggal, nomor seri hari itu, koordinat lokasi yang dimasukkan selama pengaturan, serta nilai ketinggian dan azimut Matahari saat ini. Setiap parameter dimulai dengan simbol “$” dan diakhiri dengan simbol “\r”, “\n”. Data ini dapat dilihat di komputer dengan menghubungkan pelacak melalui adaptor USB-UART. Dalam pengaturan program terminal, Anda perlu mengatur pengaturan berikut: baud rate 9600 bps, 8 bit data, satu stop bit. Di bawah ini adalah tangkapan layar dari program terminal: ![]()
Servo MG996R tidak terlindungi dari kelembaban di dalam casing, jadi jika digunakan di luar ruangan, servo harus disegel. Lepaskan keempat baut dari bagian bawah casing, dan oleskan sealant silikon netral di antara sambungan casing, dan aplikasikan sealant di sekitar manset untuk memasukkan kabel ke dalam casing. Anda juga dapat mengoleskan pelumas ke roda gigi gearbox, karena pabrik hampir tidak ada. Menurut ulasan, gemuk SHRUS-4 paling cocok, tidak seperti lithol, tidak membeku dalam cuaca dingin. Untuk menutup lubang atas, cincin silikon dapat diletakkan pada poros keluaran, dan talang harus dilepas dari adaptor, yang dipasang pada poros, agar tidak menimbulkan gesekan yang berlebihan.
Saya menempelkan pelat textolite persegi panjang ke braket pendukung, di mana saya merekatkan baterai surya menggunakan selotip dua sisi. Karena servos sering tidak diberi energi, dimungkinkan untuk memutar poros di ketinggian di bawah pengaruh gravitasi susunan surya. Untuk menghindari hal ini, saya memasang counterweight panjang yang terbuat dari sudut dan pelat ke sisi braket pembawa. Dengan mengubah massa penyeimbang, saya menyeimbangkan struktur di sepanjang sumbu rotasi ketinggian.
Pelacak melakukan panduan saat Matahari berada di atas cakrawala, yaitu saat ketinggiannya lebih besar dari 0⁰. Ketika Matahari terbenam di bawah cakrawala (nilai ketinggian negatif), pelacak mengarahkan susunan surya ke Timur, pelacakan lebih lanjut dilanjutkan saat matahari terbit. Pelacakan dilakukan di seluruh wilayah langit yang terlihat.
Pergerakan harian Matahari dan bintang-bintang dapat dilihat di komputer dalam program Stellarium, sebuah planetarium virtual gratis yang menampilkan langit berbintang yang realistis. Program ini menampilkan pergerakan tokoh-tokoh di langit, Anda dapat melihat posisi Matahari dan bintang kapan saja, data pada berbagai koordinat juga tersedia.
Saya memasang perangkat pada papan sirkuit tercetak yang saya rancang agar sesuai dengan casing GAINTA G1202G. Papan memiliki tempat untuk jumper (pelompat), yang dengannya Anda dapat mematikan daya indikator digital.
Transistor efek medan VT1 dapat diganti dengan IRLML2244, IRLML6402. Anda juga dapat menggunakan transistor dalam paket SOIC-8 (Anda harus mengulang papan): IRF9332, IRF9310, IRF9317.
Pada suhu negatif, baterai Li-ion kehilangan kapasitas yang signifikan (elektrolit membeku), tidak disarankan untuk menggunakan baterai pada suhu di bawah +5 C, karena ini menyebabkan pengurangan dini sumber daya. Oleh karena itu, jika Anda berencana untuk mengoperasikan pelacak dalam cuaca dingin, lebih baik menggunakan baterai lithium-iron-phosphate LiFePO4. Baterai jenis ini lebih tahan beku, kisaran suhu operasi dari -30 C hingga +55 C, tegangan maksimum 3,65V, minimum 2V, rata-rata 3,3V, yaitu lebih rendah dari Li -ion. Juga, keuntungannya termasuk tegangan pelepasan yang stabil mendekati 3.2V. Di akhir artikel ada tautan untuk memesan baterai, serta modul untuk mengisi daya.
Berdasarkan pelacak surya, Anda dapat membuat sistem otonom kecil yang tidak memerlukan daya eksternal, seperti stasiun cuaca jarak jauh, atau sistem keamanan untuk rumah musim panas, dll. Anda dapat mengganti servos dengan yang lebih kuat, dan memasang panel surya yang lebih besar. Dimungkinkan untuk mengadaptasi sirkuit untuk panel surya pada 12, 18V, untuk mengisi beberapa baterai yang terhubung seri, tetapi untuk ini Anda harus mengubah sirkuit dan menggunakan modul pengisian lainnya.
Berikut link pemesanan modul dan komponen perakitan solar tracker:
Baterai surya 6V 4.5W
Modul jam waktu nyata DS3231
Indikator digital pada driver MAX7219
Modul pengisian baterai li-ion pada TP4056
Baterai LiFePO4 6500mah
Baterai LiFePO4 1800mah
Modul pengisian baterai LiFePO4
Servo MG996R
Kurung untuk merakit instalasi alt-azimuth untuk servos MG996R
Boost converter pada MT3608
![]()
![]()
![]()
![]()
![]()
![]()
Untuk memulainya, mungkin ada baiknya memberi tahu apa arti artikel ini dengan pelacak surya. Singkatnya, perangkat ini adalah dudukan bergerak untuk panel surya, yang diperlukan agar di garis lintang sedang kami panel mengumpulkan cukup banyak cahaya, mengubah posisinya mengikuti matahari.
Dalam hal ini, prototipe pelacak surya dirakit berdasarkan Arduino. Untuk memutar platform pada sumbu horizontal dan vertikal, drive servo digunakan, sudut rotasi yang tergantung pada kekuatan insiden cahaya pada fotoresistor. Konstruktor logam Soviet favorit semua orang digunakan sebagai bodi.
Akan berguna untuk menyebutkan bahwa semua ini dilakukan sebagai proyek kursus, jadi saya tidak repot-repot membeli dan memasang panel surya itu sendiri dan baterai, karena kehadirannya tidak terkait dengan pekerjaan pelacak. Sebagai alasan, saya dapat mengatakan bahwa kemungkinan konstruktor logam Soviet sangat besar, jadi memasang panel surya kecil untuk mengisi daya telepon tidak akan sulit jika keinginan seperti itu muncul.
Jadi, apa yang digunakan dalam perakitan:
Pembicara, yang tiba-tiba muncul di daftar, diminta untuk meningkatkan efek teknologi tinggi. Faktanya adalah bahwa servos hanya dapat berputar 180 derajat, dan kita tidak membutuhkan lebih banyak, mengingat kita mengikuti matahari. Tetapi ketika menguji proyek, ketika Anda tidak dapat benar-benar mengikuti matahari selama dua menit demonstrasi, ternyata akan lebih baik untuk memberi sinyal pada titik mana perlu berhenti melambaikan senter, karena servo telah mencapai kematian. daerah. Untuk ini, panggilan di atas ditambahkan.
Jadi, mari kita mulai mengumpulkan pelacak. Untuk memulainya, mari kita bagi bagian depan pekerjaan yang akan datang menjadi empat tahap bersyarat: merakit dudukan untuk panel surya dan memasang servos, memasang elemen peka cahaya ke struktur rakitan, menyolder dan menulis kode untuk Arduino.
Fotoresistor terpasang dengan aman ke bodi, satu-satunya hal yang layak untuk dikerjakan adalah akurasi lokasinya di platform: sekarang mereka tidak terlihat cukup tegak lurus, yang dapat mengganggu perfeksionis dan sedikit merusak akurasi rotasi.
Sedikit sirkuit: koneksi elemen fotosensitif dilakukan sesuai dengan rangkaian pembagi tegangan, di mana resistor keluaran yang ditunjukkan dalam daftar elemen diperlukan. Semua fotoresistor disolder ke pin umum yang terhubung ke output daya lima volt Arduino. Untuk kenyamanan dan estetika, kaki fotoresistor disolder ke kontak dua kabel berinsulasi tiga inti (satu kontak tetap tidak digunakan dan disembunyikan). Semua detail sirkuit dapat dilihat pada diagram di bawah ini.




Kode
#termasuk

Saluran "bang-bang" menunjukkan cara membuat pelacak surya buatan sendiri untuk panel. Mereka akan secara otomatis berputar setelah matahari, meningkatkan efisiensi pembangkit listrik.
Anda akan membutuhkan dua panel surya dengan kapasitas masing-masing 3,5 watt. Pada output, satu memiliki lebih dari 6 volt, yang, ketika dua baterai dihubungkan secara seri, akan memberikan lebih dari 12 volt. Soket USB di bagian belakang. Tiga output dari tiga segmen baterai. Yang masing-masing menghasilkan 2 volt. Artinya, jika perlu, Anda dapat menghubungkannya dan mendapatkan 2, 4, 6 volt.

Node penting berikutnya adalah dua servos. Satu akan memutar susunan surya secara horizontal dan yang lainnya secara vertikal. Drive ini tidak sederhana, tidak mudah untuk diputar. Beberapa perbaikan diperlukan. Di set dengan masing-masing mesin adalah salib plastik, cakram, sekrup untuk pengikat. Braket dibeli untuk mesin. Juga termasuk sekrup pemasangan, bantalan dan cakram. pengontrol muatan. Ini akan menerima energi dari panel surya dan mentransfernya ke baterai.
Mari kita mulai bekerja dengan tangan kita sendiri dengan pengisian elektronik. Diagram pelacak untuk panel surya di bawah ini.  Diagram pengkabelan, papan, program pengeditan papan: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Diagram pengkabelan, papan, program pengeditan papan: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Rangkaian ini sangat sederhana dan mudah untuk diulang. Ini adalah yang paling sukses dari beberapa pilihan terbukti. Tetapi bahkan penulisnya harus sedikit berubah. Saya harus mengubah nilai resistor variabel dan tetap, sirkuit papan sirkuit tercetak dirancang.
Untuk memulainya, mari kita cetak papan sirkuit pelacak di atas kertas khusus. Ini adalah teknologi penyetrikaan laser. Kertas memiliki tampilan glossy. Di sisi sebaliknya, itu adalah matte biasa. Anda perlu mencetak pada printer laser di sisi glossy. Setelah kontak dengan setrika, itu harus dibiarkan dingin dan kertas mudah lepas dari lapisannya.

Sebelum mentransfer, textolite harus diturunkan. Yang terbaik adalah menggunakan amplas halus. Kami menempelkan pola ke papan dan menyetrikanya dengan setrika panas selama 2 menit.
Sekarang Anda perlu mengetsa papan pelacak. Amonium persulfat dapat digunakan. Dijual di toko radio. Solusi yang sama dapat digunakan beberapa kali. Diinginkan untuk memanaskan cairan hingga 45 derajat sebelum digunakan. Ini akan sangat mempercepat proses etsa. Setelah 20 menit, papan berhasil diselesaikan. Sekarang Anda perlu menghapus toner. Sekali lagi, gunakan amplas atau aseton.
Sekarang Anda bisa membuat lubang di papan. Anda dapat mulai menyolder bagian.
Inti dari pelacak surya adalah penguat operasional lm324n. Dua transistor tipe 41c, tipe 42c. Satu kapasitor keramik 104. Penulis pengembangan mengganti banyak detail dengan tipe smd. Alih-alih 5408 dioda, analog mereka dari tipe smd digunakan. Yang utama adalah menggunakan setidaknya 3 ampere. Satu resistor untuk 15 kilo-ohm, 1 untuk 47 kilo-ohm. dua fotoresistor. 2 resistor tuning untuk 100 dan 10 kilo-ohm. Yang terakhir ini bertanggung jawab atas sensitivitas sensor foto.
 Heliostat, atau sebaliknya, pelacak, adalah perangkat untuk melacak matahari, dalam kasus kami, untuk memutar panel surya sehingga selalu tegak lurus terhadap matahari. Bukan rahasia lagi bahwa dalam hal ini panel surya memberikan daya maksimum. Dalam diagram di atas, alat pelacak surya (heliostat) menggunakan kontrol pulsa dan, tanpa bantuan manusia, mampu mengarahkan susunan surya ke pencahayaan terbaik.
Heliostat, atau sebaliknya, pelacak, adalah perangkat untuk melacak matahari, dalam kasus kami, untuk memutar panel surya sehingga selalu tegak lurus terhadap matahari. Bukan rahasia lagi bahwa dalam hal ini panel surya memberikan daya maksimum. Dalam diagram di atas, alat pelacak surya (heliostat) menggunakan kontrol pulsa dan, tanpa bantuan manusia, mampu mengarahkan susunan surya ke pencahayaan terbaik.
Sirkuit heliostat terdiri dari generator jam (DD1.1, DD1.2), dua sirkuit terintegrasi (VD1R2C2, VD2R3C3), jumlah pembentuk yang sama (DD1.3, DD1.4), komparator digital (DD2), dua inverter (DD1. 5, DD1.6) dan sakelar transistor (VT1-VT6) untuk arah putaran motor listrik M1, yang mengontrol rotasi platform tempat baterai surya dipasang. Dengan daya, generator pada elemen DD1.1, DD1.2 menghasilkan pulsa clock yang mengikuti pada frekuensi sekitar 300 Hz. Saat perangkat beroperasi, durasi pulsa yang dihasilkan oleh inverter DD1.3, DD1.4 dan sirkuit integrasi VD1R2C2, VD2R3C3 dibandingkan. Kecuramannya bervariasi tergantung pada konstanta waktu integrasi, yang, pada gilirannya, tergantung pada penerangan fotodioda VD1 dan VD2 (arus pengisian kapasitor C2 dan C3 sebanding dengan penerangannya). Sinyal dari output sirkuit integrasi diumpankan ke pembentuk level DD1.3, DD1.4 dan kemudian ke komparator digital yang dibuat pada elemen sirkuit mikro DD2. Bergantung pada rasio durasi input pulsa ke komparator, sinyal tingkat rendah muncul pada output elemen DD2.3 (pin 11) atau DD2.4 (pin 4). Dengan penerangan yang sama dari fotodioda, sinyal tingkat tinggi hadir di kedua keluaran komparator. Inverter DD1.5 dan DD1.6 diperlukan untuk mengontrol transistor VT1 dan VT2. Level sinyal tinggi pada output inverter pertama membuka transistor VT1, pada output kedua - VT2. Beban transistor ini adalah kunci pada transistor kuat VT3, VT6 dan VT4, VT5, yang mengubah tegangan suplai motor listrik M1. Sirkuit R4C4R6 dan R5C5R7 menghaluskan riak di dasar transistor kontrol VT1 HVT2. Arah putaran motor berubah tergantung pada polaritas koneksi ke sumber listrik. Komparator digital tidak memungkinkan semua transistor kunci terbuka pada saat yang sama, dan dengan demikian memastikan keandalan sistem yang tinggi.
Di pagi hari dengan matahari terbit, iluminasi fotodioda VD1 dan VD2 akan berbeda, dan motor listrik akan mulai memutar panel surya dari barat ke timur. Karena perbedaan durasi pulsa pembentuk berkurang, durasi pulsa yang dihasilkan akan berkurang, dan kecepatan rotasi baterai surya akan melambat secara bertahap, yang akan memastikan posisinya yang akurat di bawah sinar matahari. Jadi, dengan kontrol pulsa, putaran poros motor dapat ditransmisikan langsung ke platform dengan baterai surya, tanpa menggunakan gearbox. Pada siang hari, platform panel surya akan berputar mengikuti pergerakan matahari. Dengan permulaan senja, durasi pulsa pada input komparator digital akan sama, dan sistem akan masuk ke mode siaga. Dalam keadaan ini, arus yang dikonsumsi oleh perangkat tidak melebihi 1,2 mA (dalam mode orientasi, itu tergantung pada daya motor).
Jika desain dilengkapi dengan blok defleksi vertikal yang dirakit sesuai dengan skema yang sama, adalah mungkin untuk mengotomatisasi sepenuhnya orientasi baterai di kedua bidang. Jika tiba-tiba tidak ada sirkuit mikro yang ditunjukkan pada diagram, mereka dapat diganti dengan sirkuit mikro seri K564, seri K176 (dengan tegangan suplai 5 ... 12 V). Transistor KT315A dapat dipertukarkan dengan salah satu seri KT201, KT315, KT342, KT3102, dan KT814A - dengan salah satu seri KT814, KT816, KT818, serta germanium P213-P215, P217. Dalam kasus terakhir, resistor dengan resistansi 1 ... 10 kOhm harus dihubungkan antara emitor dan basis transistor VT3-VT6 untuk mencegah pembukaan yang tidak disengaja karena arus balik yang signifikan. Alih-alih fotodioda FD256, Anda dapat meletakkan potongan dari sel surya (terhubung dengan polaritas), fototransistor tanpa rangkaian bias, serta fotoresistor, misalnya, SF2, SFZ atau FSK dari modifikasi apa pun. Anda hanya perlu memilih (dengan mengubah resistansi resistor R1) frekuensi generator jam sesuai dengan operasi komparator digital yang andal. Filter lampu hijau digunakan untuk melindungi fotodioda dari penyinaran yang berlebihan. Tirai buram ditempatkan di antara sensor foto. Itu dipasang tegak lurus ke papan sedemikian rupa sehingga ketika sudut iluminasi berubah, itu mengaburkan salah satu fotodioda. 










