Много често слънчевите панели се монтират твърдо и постоянно. Това е просто, но не много ефективно, тъй като през деня слънцето се движи по небето и количеството светлинна енергия, получено от слънчевите панели, се променя. Максималното връщане на слънчевата батерия е възможно само когато светлината пада върху панела перпендикулярно на неговата равнина. За да могат слънчевите лъчи да падат върху соларния панел винаги перпендикулярно. използват се системи за слънчево проследяване с различен дизайн и различни нива на сложност. Въпреки че такава система усложнява инсталирането на слънчеви панели, тя ви позволява да вземете максимума от тях. Слънчевите панели все още не са евтини и ние, инвестирайки в тях, със сигурност искаме да реализираме пълния им потенциал.
Често най-простите системи за проследяване могат да завъртят панела само по една ос. Такива устройства включват двойка фото сензори и двойка компаратори, които управляват един електродвигател, включен в диагонала на най-простия H-мост. Такива устройства, разбира се, също повишават ефективността на слънчевите панели, но не го правят много ефективно, тъй като работят само в рамките на една ос. Тази статия описва много проста система за слънчево проследяване, която обаче може да движи панела в две оси, което увеличава ефективността на соларния масив. По време на работа системата непрекъснато се опитва да позиционира панела така, че неговата равнина винаги да е перпендикулярна на падащата слънчева светлина и да получи максимално връщане на електроенергия от батерията. Устройството за проследяване следва слънцето от зори до последните лъчи на залеза и автоматично възобновява работата си на следващата сутрин.
Схема на устройствотосъдържа чипа LM339, който представлява четири аналогови компаратора в общ пакет. Два двигателя се управляват от специализирана микросхема L293D - двоен H-мост. В допълнение към микросхемите, електрическата схема съдържа няколко отделни елемента. Фоторезисторите LDR1 - LDR4 се използват като сензори за интензитет на светлината.Тези фоторезистори определят позицията на соларния панел спрямо слънчевите лъчи.
Фоторезисторният блок заедно с компаратора LM339 генерира управляващи сигнали за драйвера на двигателя L293D. Фоторезисторите LDR1 и LDR2 са фиксирани в ъглите на слънчевия панел по оста X, в LDR3 и LDR4 - по оста Y. нива на ниско напрежение.
Помислете за алгоритъма на работасистема на примера на нейната част, отговорна за движението по оста X. Ако фоторезисторът LDR2 получава повече светлина от LDR1, тогава съпротивлението на LDR2 става по-малко от съпротивлението на LDR1.На входовете на компараторите A1 и A1 се появява по-високо ниво на напрежение A2 (4, 7). В този случай на изхода на компаратора A2 (1) се появява високо напрежение. Мотор M1 започва да се върти в една от посоките (да речем, обратно на часовниковата стрелка), завъртайки слънчевия панел.
Ако LDR1 получава повече светлина от LDR2, тогава съпротивлението му става по-малко от съпротивлението на LDR2, като по този начин се намалява напрежението на входовете на компаратора (4, 7). На изхода (2) на компаратора A2 се появява високо ниво и двигателят започва да се върти в обратна посока (да речем по часовниковата стрелка). Проследяването по оста Y работи по абсолютно същия начин.
Фигурата по-долу показва възможен дизайн на слънчева система за проследяване. Веригата може да бъде сглобена на унифицирана макетна платка или за нея може да се насочи конвенционална печатна платка.
След използването на слънчеви панели за производство на електроенергия в индустриален мащаб, инженерите и дизайнерите започнаха да търсят начини за повишаване на ефективността на такива електроцентрали. Общата дисперсия на слънчевата светлина, която се определя от промяната в посоката на падане на слънчевите лъчи върху фотоклетките, не позволява ефективно използване на слънчевите панели през целия ден. Изход от тази ситуация беше намерен доста бързо - слънчевите панели започнаха да се инсталират на подвижна основа, свързана със система за слънчево проследяване.
Както знаете, за да получите максимална мощност от слънчевите панели, е необходимо слънчевите лъчи да попадат перпендикулярно на равнината на батериите. При тази посока на лъчите ефективността на слънчевите панели може да достигне 50-55%. За постоянно инсталирани батерии тази цифра може да бъде намалена до 10-15% поради промени в ъгъла на падане на слънчевата светлина.
Устройството за слънчево проследяване се състои от две основни части:
1. Схемата за управление, която определя позицията на Слънцето. Най-простата диаграма на слънчево проследяващо устройство или по друг начин тракер (Solar Tracker) е показана по-долу. За определяне на позицията на Слънцето се използват два фоторезистора. Схемата включва:
- Чип за операционен усилвател LM1458 (K140UD20);
- транзистори BD139 (KT815G, KT961A) и BD140 (KT814G, KT626V);
- фоторезистори;
- диоди 1N4004 (KD243G);
- резистори и настройващи резистори.

2. Механизми за обръщане и накланяне на батерии в зависимост от посоката на слънчевите лъчи. Механизмът за накланяне позволява използването на такива системи за проследяване във всякакви географски ширини: при инсталиране на слънчеви панели в зона, която съответства на 320 северна ширина, оста на устройството трябва да се завърти на 320 спрямо хоризонта. Задвижванията на всички механизми на системата за проследяване са изградени на базата на електродвигатели, които се влияят от системата за управление. Електрическите двигатели и системата за управление се захранват от самите соларни панели, така че такива инсталации са автономни.
Както можете да видите, схемата и устройството на соларния тракер са доста прости. Естествено, по-сложни системи се използват в индустриален мащаб, но подобна схема може да бъде сглобена самостоятелно за битова инсталация за производство на електроенергия на базата на слънчеви панели.

Мрежата съдържа голям брой готови схеми и решения за соларни системи за проследяване. Така че, ако има нужда да подобрите дизайна на слънчевите панели и да увеличите тяхната производителност, винаги има възможност да го направите сами.
Соларен тракер е електронно-механична система, предназначена да насочва слънчеви панели към Слънцето. Системата проследява позицията на Слънцето в небето и управлява серво, което върти панелите в подходящата посока. Използването на такъв тракер ви позволява да получите максимална производителност от слънчеви панели.
Повечето домашни тракери, намерени в Интернет, са сглобени на Arduino, фотосензорите се използват за определяне на позицията на Слънцето. В зависимост от степента на осветеност и взаимното разположение на фотосензорите се извършва завой в посока на максимална осветеност. Този метод има недостатъци: не е известно как ще се държи системата при облачно време; ниска устойчивост на шум по отношение на реакция на лунна светлина и ярки източници на светлина, както и на отделни облаци.
Поради горните недостатъци, разработих своя собствена версия на икономичен серво задвижван слънчев тракер, който осигурява проследяване на Слънцето във видимото небе по всяко време, независимо от географското местоположение.
Положението на Слънцето в небето може да се определи не само от осветеността на фотосензорите, но и от формулите на небесната механика въз основа на географските координати на точката на наблюдение и точното време. Сега ще има много дефиниции и формули, свързани с небесната механика, така че се пригответе да напрегнете извивките си). За да посочите слънчевите панели, трябва да определите хоризонталните координати на Слънцето, това е височината и азимута. Центърът на тази координатна система съвпада с местоположението на наблюдателя, изчисленията се извършват спрямо равнината на математическия хоризонт.
Височината h е ъгълът между равнината на постелката. хоризонт и посока към светилото, преброени от 0⁰ до +90⁰ до зенита и от 0⁰ до -90⁰ до надира.
Азимут А - ъгълът между линията на обяд (грубо казано, посоката на юг) и линията на пресичане на равнината на мат. хоризонт с равнината на вертикалния кръг на светилото. Отчита се от южната точка по посока на дневното въртене на небесната сфера в рамките на 0⁰ ... 360⁰, или от 0⁰ до +180⁰ на запад и от 0⁰ до −180⁰ на изток. Хоризонталните координати на звездата постоянно се променят поради ежедневното въртене на Земята.
По-долу са дадени формулите за изчисляване на височината и азимута на осветителното тяло:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ разходи);
A = atan2 (cos
където δ е деклинацията на звездата, t е часовият ъгъл на звездата, ϕ е географската ширина на точката на наблюдение (0⁰…+90⁰ за северното полукълбо, 0⁰…-90⁰ за южното, 0⁰ е екваторът).
Декриптиране на функцията atan2(y, x): 
Както можете да видите, за да изчислите хоризонталните координати, е необходимо да изчислите деклинацията и часовия ъгъл на звездата. Тези координати се отнасят до първата екваториална координатна система, където основната равнина е равнината на небесния екватор.
Деклинация δ - ъгълът между равнината на небесния екватор и посоката към светилото, се измерва от 0⁰ до +90⁰ към северния полюс и от 0⁰ до -90⁰ към южния полюс.
Часовият ъгъл t е двустенният ъгъл между равнината на небесния меридиан и деклинационния кръг на светилото. Отчита се в посоката на дневното въртене на небесната сфера, на запад от горната точка на небесния екватор, в рамките на 0⁰ ... 360⁰, или от 00:00 до 24:00 (на час). Също така часовият ъгъл може да бъде измерен от 0⁰ до 180⁰ (от 00:00 до 12:00) на запад и от 0⁰ до −180⁰ (от 00:00 до -12:00) на изток. Часовият ъгъл е равен на 0 в момента на горната кулминация на звездата, за Слънцето по обяд (не винаги е същото време, когато часовникът показва 12:00 местно време).
Деклинацията на Слънцето се променя през годината (неравномерно) от -23,43⁰ до +23,43⁰, което се дължи на орбиталното движение на Земята около Слънцето и не е свързано с дневното въртене на Земята. За да определите деклинацията на Слънцето за всеки ден от годината, най-лесният начин е от таблицата със средни стойности на деклинация за 4-годишен цикъл. Таблицата може да бъде изтеглена в края на статията.
Часовият ъгъл на звездата се променя през деня (поради ежедневното въртене на Земята), може да се изчисли, като се знае истинското слънчево време:
t \u003d Ts.ist - 12:00 ч, (-12:00 ... + 11:59),
където Ts.ist е истинското слънчево време (00:00…23:59h).
Истинското слънчево време може да се изчисли, като се знае местното време, часовата зона и дължината на точката на наблюдение:
Ts.ist = Ts.av + EOT, или Ts.ist = UTC + λ + EOT,
където Ts.av е средното слънчево време в дадена точка на Земята (зависи от дължината на точката), UTC е универсалното координирано време, λ е дължината на точката на наблюдение в часови единици, EOT е уравнението на времето.
Координираното универсално време може да се изчисли от местно време (Tm) и часова зона (N): UTC = Tm – N. Географска дължина λ се измерва от 0⁰ до 180⁰ на изток от основния меридиан (източна дължина) и от 0⁰ до -180⁰ на запад (западна дължина). Когато замествате в горната формула, географската дължина трябва да се преобразува в часови единици (1⁰ = 4 минути).
Уравнението на времето EOT показва разликата между средното слънчево време и истинското слънчево време, тъй като дневното движение на Слънцето е неравномерно поради елиптичността на земната орбита, както и наклона на земната ос към равнината на еклиптиката:
EOT = 9,87 ∙ sin2B - 7,53 ∙ cosB - 1,5 ∙ sinB,
където B = (360⁰ (N-81))/365, N е поредният номер на деня в годината.
Така през годината стойността на уравнението на времето се променя от -14,3 минути до +16,4 минути.
По-долу има графика как се променя уравнението на времето в течение на една година: 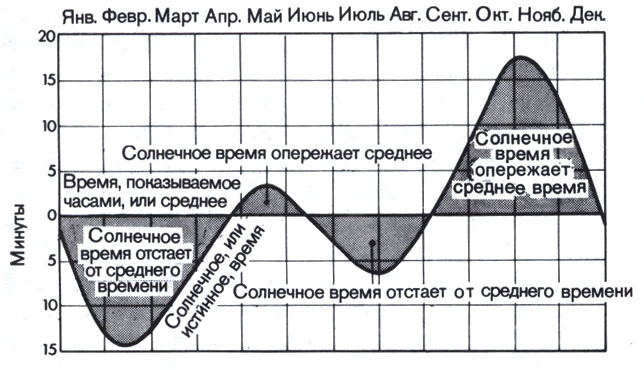
Трябваше да въведа всички тези изчисления в програмата на микроконтролера, не смеех да пиша на асемблер, така че започнах да изучавам SI, трябваше да се занимавам с формули и изчисления седмици наред, за да получа правилния резултат, изучавайки SI по пътя. В резултат на това успях да напиша работеща програма, докато грешката в изчислението не надвишава ±1⁰.
Соларният тракер е замислен за малка слънчева батерия с мощност 2W и напрежение 6V за зареждане на литиево-йонна батерия, но е по-добре да използвате по-мощна батерия от поне 4W. Като електрически задвижвания използвах серво MG996R (можете да закупите в Китай, връзката е дадена в края на статията). Освен това закупих специални скоби за сглобяване на алт-азимутна инсталация (връзка за поръчка в края на статията). Сглобеният дизайн ви позволява да ориентирате слънчевата батерия по височина и азимут, докато сервото за азимут е неподвижно и върти сервото за височина заедно със скобите.
По-долу е дадена диаграма на соларния тракер: ![]()
Схемата е базирана на микроконтролера PIC16F876A, който има значително количество памет и съдържа много периферни модули. Цялата структура се захранва от литиево-йонна батерия, която съответно се зарежда от слънчева батерия чрез модул, базиран на чип TP4056, това е специализиран контролер за зареждане на литиево-йонни батерии (връзка за поръчка в края на статията) . За определяне на текущия час и дата схемата използва модул (линк за поръчка в края на статията). Часовникът е доста точен, дрейфът на времето е ± 2 минути на година, вече писах подробна статия за тях, които желаят могат да се запознаят. За показване на параметрите се използва цифров индикатор на (линк за поръчка в края на статията).
Максималното напрежение на литиево-йонната батерия не надвишава 4,1 V, което не е достатъчно за захранване на сервосистемите, така че към веригата е добавен модул за повишаване, базиран на чипа MT3608 (линк за поръчка в края на статията ). Минималното входно напрежение на модула е 2V, максималният ток на натоварване е 2A, модулът има многооборотен променлив резистор за регулиране на изходното напрежение. За да се пести енергия, захранването към сервомеханизмите не се подава постоянно, а само за промяна на позицията на вала. Захранването се превключва с помощта на p-канален полеви транзистор VT1, преобразувателният модул също се управлява от микроконтролера.
Модулната платка не осигурява контакт за управление, така че е необходимо допълнително да запоите проводника към 4-ия щифт на чипа MT3608, това е входът за включване / изключване на преобразувателя. На платката този щифт е свързан към захранването „+“, първо трябва да изрежете пистите, подходящи за този щифт (за това ще трябва да разпоите микросхемата) или да повдигнете щифта над платката. На платката на модула е инсталиран резисторен чип с разделител на напрежение, увеличаването на съпротивлението на този резистор също ще намали консумацията в режим на заспиване, замених го с друг, със съпротивление 9,1 kOhm, първоначално беше 2,2 kOhm. След смяната трябва да настроите изходното напрежение на около 5-5,5 V, за да захранвате сервомоторите, фигурата по-долу: 
Модулът на часовника също трябва да бъде подобрен, за да намалите консумацията на енергия, трябва да запоите чипа с памет 24c32, светодиода „POWER“, както и резистора (200 Ohm), през който външното захранващо напрежение се подава към батерията , защо китайците са направили това остава неразбираемо, защото батерията не е предназначена за зареждане, вижте снимката по-долу: 
Светодиодът HL1 е настроен да показва грешка в комуникацията с часовника DS3231 (чрез интерфейса I2C), светодиодът започва да мига, ако няма отговор от часовника.
Сглобяването на настройката на алт-азимут трябва да започне, когато сервоприводите са настроени на средно положение, това се случва, когато устройството е включено за първи път, индикаторът ще покаже надписа „Cent“. Азимуталното серво е желателно да се монтира на плоча, която ще служи като основа на инсталацията, или на стойка, така че изходящият вал да е насочен вертикално нагоре. След това трябва да прикрепите скобата за серво управление на височината, първо трябва да завиете плъзгащата се втулка към скобата, след това адаптерната втулка. Скобата трябва да бъде поставена перпендикулярно на дългата страна на азимуталното серво, както е показано на снимката: 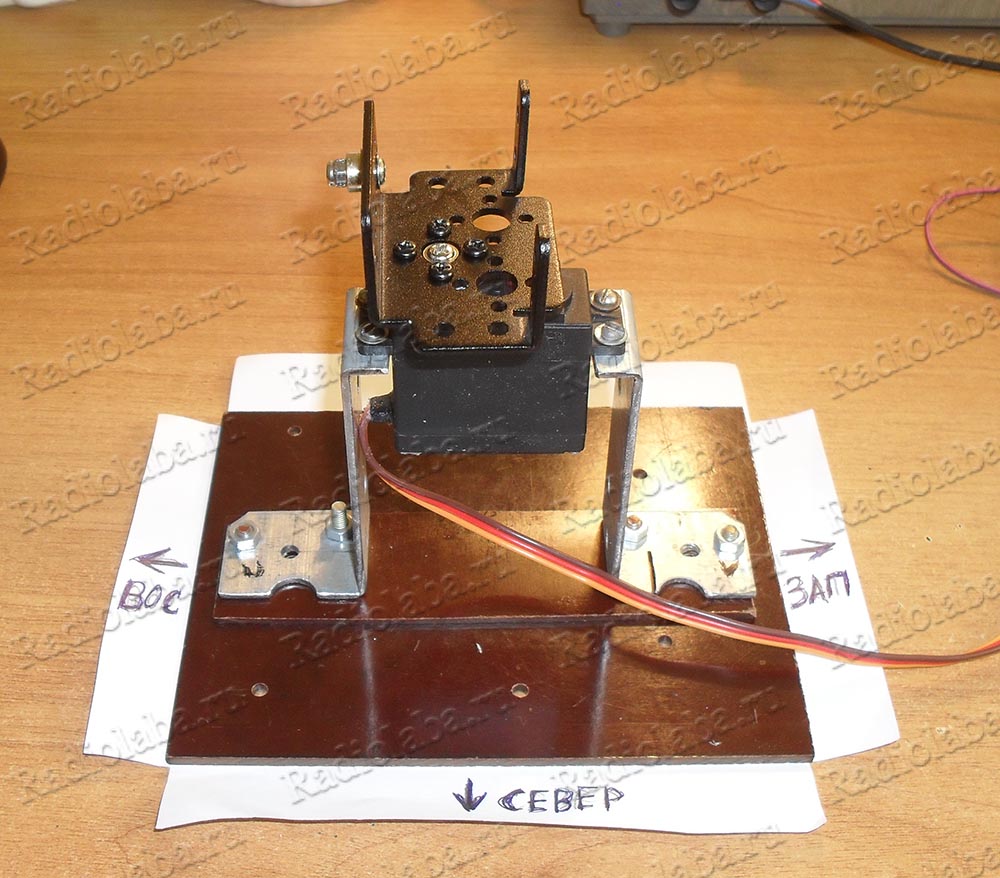
При сглобяване е трудно да се постигне перпендикулярно положение, но това не е необходимо, допустими са отклонения в рамките на ± 5-10 градуса. В бъдеще корекцията на софтуера ще премахне това отклонение.
След като фиксирате сервото за височина, остава да закрепите носещата скоба, първо опитайте адаптерната втулка на серво вала, изберете позиция, така че носещата скоба след монтажа да е насочена вертикално нагоре. Отново, не е необходимо да задавате точната позиция, както казах по-рано. Общ изглед на инсталацията е показан на следната снимка: 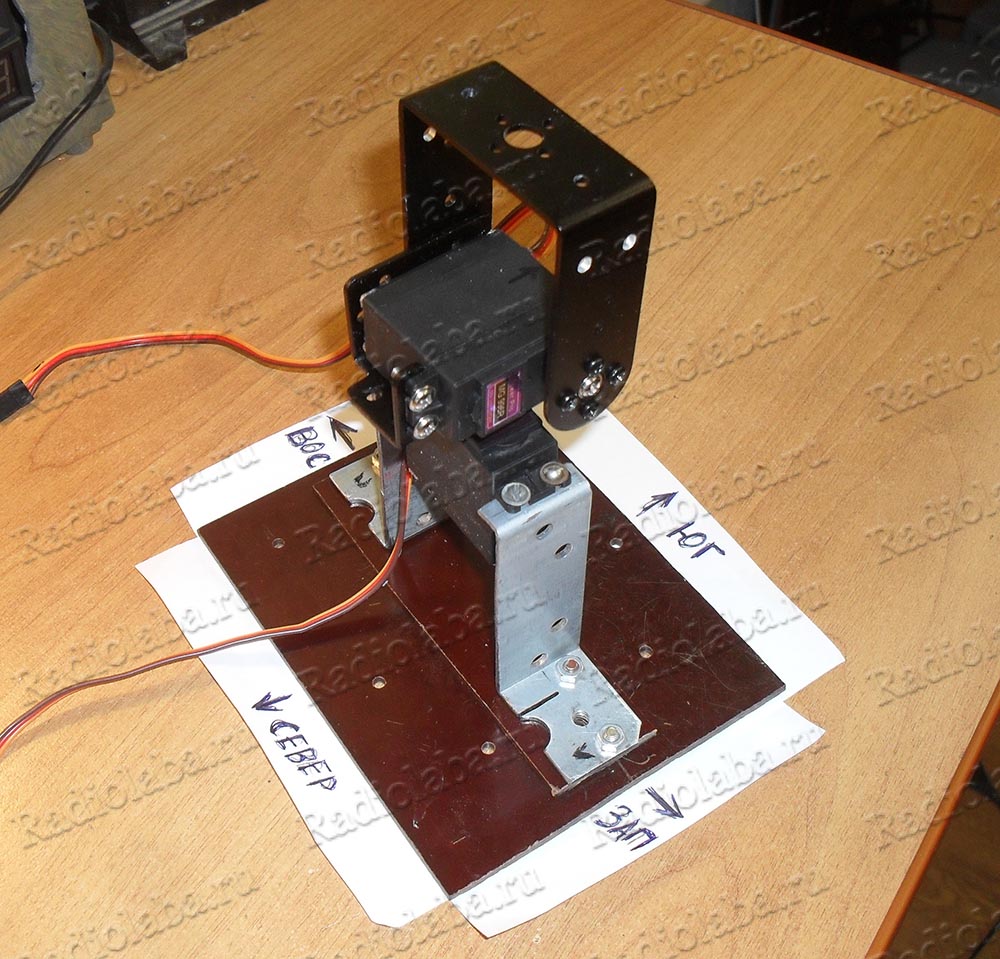
Следва процедурата за регулиране на крайните позиции на сервомоторите. Регулирането трябва да се извършва на равна повърхност, когато серво валът е азимутално вертикален (оста на въртене е насочена по отвес). След натискане на бутона „Enter“ носещата скоба се завърта към условния север и заема хоризонтално положение (на индикатора се показва надписът „север“): 
Ако има отклонение от хоризонталата, тогава трябва да регулирате позицията на скобата с помощта на бутоните „Set“ и „Discharge“. Така се регулира крайната позиция на сервото. Освен това при натискане на бутона „Enter“ скобата се завърта към условния юг (на индикатора е изписан юг). Ако е необходимо, регулирайте хоризонталната позиция на скобата, както е описано по-горе.
По-нататъшното натискане на бутона "Enter" ще завърти рамото към условния изток (на индикатора има надпис EASt). Бутоните „Set“ и „Discharge“ коригират посоката, докато е удобно да се фокусирате върху тялото на азимуталното серво задвижване, необходимо е скобата да бъде насочена по дългата страна на тялото, когато се гледа отгоре: 
При следващото натискане на бутона „Enter“ скобата ще се обърне на запад (индикаторът показва надписа WESt), настройката се извършва, както е описано по-горе.
В резултат на корекцията скобата се завърта по височина и азимут в рамките на 180⁰, корекционните стойности се съхраняват в EEPROM паметта на микроконтролера. След натискане на бутона "Enter", скобата ще вземе коригираната посока към условния юг. За правилната ориентация на слънчевата батерия, посоката към условния юг трябва да показва реалната точка на юг в дадената област, а серво задвижващият вал по азимут е разположен вертикално по отвес.
След повторно натискане на бутона „Enter“ трябва да се настроят часът, датата, часовата зона, координатите на местоположението и продължителността на режима на заспиване. Съответно, за всеки параметър на индикатора се показват следните надписи:
– местно време, по подразбиране 0 ч. 0 мин.;
– дължина на местоположението, по подразбиране -0 градуса. 0 мин. (за западна дължина се поставя знак минус "-");
– географска ширина на местоположението, по подразбиране -0 градуса. 0 мин. (за южната ширина се поставя знак минус "-");
– часова зона, по подразбиране -0, (за западна дължина се поставя знак минус „-“);
– продължителност на спящия режим, по подразбиране 1 мин.
Бутоните “Discharge” и “Set” задават стойностите на параметрите, при натискане на бутона “Enter” се записват стойностите за час и дата, останалите параметри се съхраняват в EEPROM паметта на микроконтролера. След въвеждане на всички параметри индикаторът изписва надпис УСПЕХ (за 1 секунда, след което индикаторът изгасва), след което инсталацията се насочва към Слънцето, според въведените параметри.
За пестене на енергия насочването към Слънцето се извършва след определен период от време, който е зададен в параметъра Продължителност на режим Sleep. След насочване сервосистемите се изключват, микроконтролерът преминава в режим на заспиване, общата консумация на тракера се намалява до 160 μA. Продължителността на "сън" може да бъде зададена в рамките на 1-255 минути.
При повторно включване на тракера (след изключване на захранването) първо се проверява EEPROM паметта, ако запаметените параметри са правилни, тракерът продължава да следи Слънцето, докато цифровият индикатор остава в режим на заспиване и не се включва пестя енергия. Като цяло можете да изключите захранването на индикатора след първоначалното въвеждане на параметри. За да влезете отново в режим на корекция, трябва да задържите бутона „Set“ и да включите тракера. Ако параметрите, прочетени от EEPROM, са неправилни или липсват, той също ще влезе в режим на коригиране.
Допълнително добавих функцията за извеждане на основните параметри чрез интерфейса UART към програмата на микроконтролера. След като изчисли позицията на Слънцето, микроконтролерът предава текущата стойност на часа, датата, серийния номер на деня, координатите на местоположението, въведени по време на настройката, както и текущите стойности на височината и азимута на Слънцето. Всеки параметър започва със символа “$” и завършва със символите “\r”, “\n”. Тези данни могат да се видят на компютър чрез свързване на тракера чрез USB-UART адаптер. В настройките на терминалната програма трябва да зададете следните настройки: скорост на предаване 9600 bps, 8 бита данни, един стоп бит. По-долу е екранна снимка от терминалната програма: ![]()
Сервомашините MG996R не са защитени от влага в кутията, така че в случай на употреба на открито, сервосистемите трябва да бъдат запечатани. Отстранете четирите болта от долната страна на кутията и нанесете неутрален силиконов уплътнител между ставите на кутията и нанесете уплътнител около маншета, за да влезете в проводниците в кутията. Можете допълнително да нанесете грес върху зъбните колела на скоростната кутия, тъй като фабричната практически липсва. Според рецензиите, смазката SHRUS-4 е най-подходяща, за разлика от литола, тя не замръзва на студа. За уплътняване на горния отвор може да се постави силиконов пръстен на изходящия вал, а фаската трябва да се отстрани от адаптера, който е монтиран на вала, за да не се създава излишно триене.
Прикрепих правоъгълна текстолитна плоча към носещата скоба, върху която залепих слънчевата батерия с двустранна лента. Тъй като сервосистемите са без ток през повечето време, е възможно валът да се върти във височина под въздействието на гравитацията на слънчевия масив. За да избегна това, прикрепих дълги противотежести, направени от ъгли и плочи към страните на носещата скоба. Променяйки масата на противотежестите, балансирах конструкцията по оста на въртене на височината.
Тракерът извършва насочване, когато Слънцето е над хоризонта, тоест когато височината му е по-голяма от 0⁰. Когато Слънцето залезе под хоризонта (отрицателна стойност на надморска височина), тракерът насочва слънчевия масив на изток, по-нататъшното проследяване се възобновява при изгрев. Проследяването се извършва върху цялата видима област на небето.
Дневното движение на Слънцето и звездите може да се гледа на компютър в програмата Stellarium, безплатен виртуален планетариум, който показва реалистично звездно небе. Програмата показва движението на светилата в небето, можете да видите позицията на Слънцето и звездите по всяко време, налични са и данни за различни координати.
Монтирах устройството на печатна платка, която проектирах да пасне на кутията GAINTA G1202G. На платката има място за джъмпер (джъмпер), с който можете да изключите захранването на цифровия индикатор.
Полевият транзистор VT1 може да бъде заменен с IRLML2244, IRLML6402. Можете също да използвате транзистори в пакета SOIC-8 (ще трябва да преработите платката): IRF9332, IRF9310, IRF9317.
При отрицателни температури литиево-йонните батерии губят значителен капацитет (електролитът замръзва), не се препоръчва използването на батерии при температури под +5 ⁰C, тъй като това води до преждевременно намаляване на ресурса. Ето защо, ако планирате да работите с тракера в мразовито време, по-добре е да използвате LiFePO4 литиево-желязо-фосфатна батерия. Батериите от този тип са по-устойчиви на замръзване, температурният диапазон на работа е от -30 ⁰C до +55 ⁰C, максималното напрежение е 3,65 V, минималното е 2 V, средното е 3,3 V, тоест по-ниско от това на Li -йон. Също така, предимствата включват стабилно напрежение на разряд близо до 3,2 V. В края на статията има линкове за поръчка на батерия, както и модул за зареждане.
На базата на слънчев тракер можете да създадете малка автономна система, която не изисква външно захранване, като отдалечена метеорологична станция или система за сигурност за лятна къща и др. Можете да замените сервото с по-мощни и да инсталирате по-голям слънчев панел. Възможно е да се адаптира веригата за слънчеви панели на 12, 18V, за зареждане на няколко последователно свързани батерии, но за това ще трябва да промените веригата и да използвате други модули за зареждане.
По-долу има връзки за поръчка на модули и компоненти за сглобяване на соларен тракер:
Соларна батерия 6V 4.5W
Модул часовник за реално време DS3231
Цифров индикатор на драйвер MAX7219
Модул за зареждане на литиево-йонна батерия на TP4056
Батерия LiFePO4 6500mah
Батерия LiFePO4 1800mah
Модул за зареждане на батерия LiFePO4
Серво MG996R
Скоби за монтаж на алт-азимутна инсталация за серво MG996R
Boost конвертор на MT3608
![]()
![]()
![]()
![]()
![]()
![]()
Като начало вероятно си струва да кажете какво означава тази статия под слънчев тракер. Накратко, устройството представлява подвижна стойка за соларен панел, която е необходима, за да може в нашите умерени географски ширини панелът да събира достатъчно количество светлина, променяйки позицията си следвайки слънцето.
В този случай прототипът на соларния тракер е сглобен на базата на Arduino. За завъртане на платформата в хоризонтална и вертикална ос се използват серво задвижвания, чийто ъгъл на въртене зависи от силата на падащата светлина върху фоторезисторите. За корпус се използва любимият на всички съветски метален конструктор.
Би било полезно да спомена, че всичко това беше направено като курсов проект, така че не си направих труда да закупя и монтирам самия соларен панел и батерията, тъй като тяхното присъствие не е свързано с работата на тракера. Като извинение мога да кажа, че възможностите на съветския метален конструктор са огромни, така че завинтването на малък слънчев панел към него за зареждане на телефона няма да е трудно, ако възникне такова желание.
И така, какво беше използвано в сглобяването:
Говорителят, който внезапно се появи в списъка, трябваше да засили високотехнологичния ефект. Факт е, че сервомеханизмите могат да се въртят само на 180 градуса и нямаме нужда от повече, като се има предвид, че следваме слънцето. Но при тестване на проекта, когато не можете наистина да следвате слънцето за две минути от демонстрацията, се оказа, че би било хубаво да сигнализирате в кой момент си струва да спрете да размахвате фенерчето, защото сервото е стигнало до мъртвия зона. За тази цел беше добавено горното обаждане.
И така, нека започнем да събираме тракера. Като начало, нека разделим предстоящия фронт на работа на условни четири етапа: сглобяване на стойката за слънчеви панели и монтаж на серво, закрепване на светлочувствителни елементи към сглобената конструкция, запояване и писане на код за Arduino.
Фоторезисторите са доста сигурно закрепени към тялото, единственото нещо, с което би си струвало да се работи, е точността на тяхното местоположение на платформата: сега те не изглеждат достатъчно перпендикулярно, което може да разстрои перфекционистите и леко да развали точността на въртене.
Малко схема: свързването на фоточувствителните елементи се извършва според веригата на делителя на напрежението, за която са необходими изходните резистори, посочени в списъка с елементи. Всички фоторезистори са запоени към общ щифт, свързан към петволтовия изход на Arduino. За удобство и естетика краката на фоторезисторите са запоени към контактите на два трижилни изолирани проводника (единият контакт остана неизползван и скрит). Всички подробности за веригата могат да се видят на диаграмата по-долу.




Кодът
#включи

Каналът "банг-банг" показа как да си направим домашен соларен тракер за панели. Те автоматично ще се въртят след слънцето, повишавайки ефективността на електроцентралата.
Ще ви трябват два слънчеви панела с мощност от 3,5 вата всеки. На изхода единият има повече от 6 волта, което при последователно свързване на две батерии ще даде повече от 12 волта. USB букса на гърба. Три изхода от три сегмента на батерията. Всеки от които генерира 2 волта. Тоест, ако е необходимо, можете да свържете съответно и да получите 2, 4, 6 волта.

Следващият важен възел са две сервосистеми. Единият ще върти слънчевия масив хоризонтално, а другият вертикално. Тези задвижвания не са прости, не са толкова лесни за завъртане. Необходимо е известно подобрение. В комплекта към всеки от двигателите има пластмасови кръстове, дискове, винтове за закрепване. Закупени носачи за двигателя. Включени са също монтажни винтове, лагер и дискове. контролер за зареждане. Той ще получава енергия от слънчеви панели и ще я предава на батерията.
Нека започнем да работим със собствените си ръце с електронно пълнене. Диаграмата на тракера за слънчевия панел е по-долу.  Електрическа схема, платка, програма за редактиране на платка: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Електрическа схема, платка, програма за редактиране на платка: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Веригата е много проста и лесна за повторение. Това е най-успешният от няколко доказани варианта. Но дори нейният автор трябваше да се промени малко. Трябваше да променя стойностите на променливи и постоянни резистори, беше проектирана схема на печатна платка.
Като начало, нека отпечатаме платката на тракера на специална хартия. Това е технология за лазерно гладене. Хартията има лъскав вид. На обратната страна е обичайният мат. Трябва да печатате на лазерен принтер от лъскавата страна. След контакт с ютията трябва да се остави да изстине и хартията лесно да се отдели от слоя.

Преди прехвърляне текстолитът трябва да бъде обезмаслен. Най-добре е да използвате фина шкурка. Прикрепяме шаблона към дъската и го гладим с гореща ютия за 2 минути.
Сега трябва да гравирате тракерната платка. Може да се използва амониев персулфат. Продава се в магазини за радиостанции. Едно и също решение може да се използва няколко пъти. Преди употреба е желателно течността да се загрее до 45 градуса. Това значително ще ускори процеса на ецване. След 20 минути дъската беше успешно завършена. Сега трябва да премахнете тонера. Отново използвайте шкурка или ацетон.
Сега можете да направите дупка в дъската. Можете да започнете да запоявате части.
Сърцето на слънчевия тракер е операционният усилвател lm324n. Два транзистора тип 41c, тип 42c. Един керамичен кондензатор 104. Авторът на разработката замени много детайли с тип smd. Вместо 5408 диода бяха използвани техните аналози от типа smd. Основното е да използвате поне 3 ампера. Един резистор за 15 килоома, 1 за 47 килоома. два фоторезистора. 2 резистора за настройка за 100 и 10 килоома. Последният отговаря за чувствителността на фотосензора.
 Хелиостатът или по друг начин тракерът е устройство за проследяване на слънцето, в нашия случай за завъртане на слънчеви панели така, че да са винаги перпендикулярни на слънцето. Не е тайна, че именно в този случай слънчевият панел дава максимална мощност. В диаграмата по-горе слънчевото проследяващо устройство (хелиостат) използва импулсен контрол и без човешка помощ е в състояние да ориентира слънчевия масив към най-доброто осветление.
Хелиостатът или по друг начин тракерът е устройство за проследяване на слънцето, в нашия случай за завъртане на слънчеви панели така, че да са винаги перпендикулярни на слънцето. Не е тайна, че именно в този случай слънчевият панел дава максимална мощност. В диаграмата по-горе слънчевото проследяващо устройство (хелиостат) използва импулсен контрол и без човешка помощ е в състояние да ориентира слънчевия масив към най-доброто осветление.
Веригата на хелиостата се състои от тактов генератор (DD1.1, DD1.2), две интегриращи вериги (VD1R2C2, VD2R3C3), същия брой формирачи (DD1.3, DD1.4), цифров компаратор (DD2), две инвертори (DD1. 5, DD1.6) и транзисторен превключвател (VT1-VT6) за посоката на въртене на електродвигателя M1, който управлява въртенето на платформата, върху която е монтирана слънчевата батерия. При включено захранване генераторът на елементите DD1.1, DD1.2 генерира тактови импулси, които следват с честота около 300 Hz. При работа на устройството се сравняват продължителностите на импулсите, генерирани от инверторите DD1.3, DD1.4 и интегралните схеми VD1R2C2, VD2R3C3. Тяхната стръмност варира в зависимост от времеконстантата на интегриране, която от своя страна зависи от осветеността на фотодиодите VD1 и VD2 (токът на зареждане на кондензаторите C2 и C3 е пропорционален на тяхната осветеност). Сигналите от изходите на интегриращите схеми се подават към формирателите на ниво DD1.3, DD1.4 и след това към цифров компаратор, направен върху елементите на микросхемата DD2. В зависимост от съотношението на продължителността на импулсите, въведени в компаратора, на изхода на елемента DD2.3 (пин 11) или DD2.4 (пин 4) се появява сигнал с ниско ниво. При еднакво осветяване на фотодиодите сигнали с високо ниво има и на двата изхода на компаратора. За управление на транзистори VT1 и VT2 са необходими инвертори DD1.5 и DD1.6. Високо ниво на сигнала на изхода на първия инвертор отваря транзистора VT1, на изхода на втория - VT2. Натоварванията на тези транзистори са ключове на мощни транзистори VT3, VT6 и VT4, VT5, които превключват захранващото напрежение на електродвигателя M1. Веригите R4C4R6 и R5C5R7 изглаждат пулсациите в основите на управляващите транзистори VT1 HVT2. Посоката на въртене на двигателя се променя в зависимост от полярността на връзката към източника на захранване. Цифровият компаратор не позволява всички ключови транзистори да се отварят едновременно и по този начин осигурява висока надеждност на системата.
Сутринта с изгрева осветлението на фотодиодите VD1 и VD2 ще бъде различно и електрическият мотор ще започне да върти слънчевия панел от запад на изток. С намаляването на разликата в продължителността на импулсите на шейпърите, продължителността на резултантния импулс ще намалее, а скоростта на въртене на слънчевата батерия постепенно ще се забави, което ще осигури нейното точно позициониране на слънце. Така с импулсно управление въртенето на вала на двигателя може да се предава директно на платформата със слънчева батерия, без използване на скоростна кутия. През деня платформата на соларния панел ще се върти с движението на слънцето. С настъпването на здрача продължителността на импулсите на входа на цифровия компаратор ще бъде същата и системата ще премине в режим на готовност. В това състояние токът, консумиран от устройството, не надвишава 1,2 mA (в режим на ориентация зависи от мощността на двигателя).
Ако дизайнът е допълнен с блок за вертикално отклонение, сглобен по подобна схема, е възможно напълно да се автоматизира ориентацията на батерията в двете равнини. Ако внезапно на диаграмата не са посочени микросхеми, те могат да бъдат заменени с микросхеми от серията K564, K176 (със захранващо напрежение 5 ... 12 V). Транзисторите KT315A са взаимозаменяеми с всяка от сериите KT201, KT315, KT342, KT3102 и KT814A - с всяка от сериите KT814, KT816, KT818, както и германий P213-P215, P217. В последния случай между емитерите и базите на транзисторите VT3-VT6 трябва да се свържат резистори със съпротивление от 1 ... 10 kOhm, за да се предотврати случайното им отваряне поради значителен обратен ток. Вместо фотодиоди FD256 можете да поставите парчета от слънчеви клетки (свързани с полярност), фототранзистори без вериги на отклонение, както и фоторезистори, например SF2, SFZ или FSK от всяка модификация. Необходимо е само да изберете (чрез промяна на съпротивлението на резистора R1) честотата на тактовия генератор според надеждната работа на цифровия компаратор. Използва се филтър за зелена светлина за защита на фотодиодите от прекомерно облъчване. Между фотосензорите е поставено непрозрачно перде. Той е фиксиран перпендикулярно на платката по такъв начин, че при промяна на ъгъла на осветяване закрива един от фотодиодите. 










