Πολύ συχνά, οι ηλιακοί συλλέκτες εγκαθίστανται άκαμπτα και μόνιμα. Αυτό είναι απλό, αλλά όχι πολύ αποτελεσματικό, καθώς κατά τη διάρκεια της ημέρας ο ήλιος κινείται στον ουρανό και η ποσότητα της φωτεινής ενέργειας που λαμβάνεται από τα ηλιακά πάνελ αλλάζει. Η μέγιστη επιστροφή της ηλιακής μπαταρίας είναι δυνατή μόνο όταν το φως πέσει στο πάνελ κάθετα στο επίπεδό του. Για να πέφτουν οι ακτίνες του ήλιου στο ηλιακό πάνελ πάντα κάθετα. Χρησιμοποιούνται ηλιακά συστήματα παρακολούθησης διαφορετικών σχεδίων και διαφορετικών επιπέδων πολυπλοκότητας. Αν και ένα τέτοιο σύστημα περιπλέκει την εγκατάσταση ηλιακών συλλεκτών, σας επιτρέπει να πάρετε το μέγιστο από αυτά. Τα ηλιακά πάνελ εξακολουθούν να μην είναι φθηνά και εμείς, επενδύοντας σε αυτά, θέλουμε σίγουρα να αξιοποιήσουμε πλήρως τις δυνατότητές τους.
Συχνά τα πιο απλά συστήματα παρακολούθησης μπορούν να περιστρέψουν τον πίνακα μόνο σε έναν άξονα. Τέτοιες συσκευές περιλαμβάνουν ένα ζεύγος αισθητήρων φωτογραφίας και ένα ζεύγος συγκριτών που ελέγχουν έναν ηλεκτρικό κινητήρα που περιλαμβάνεται στη διαγώνιο της απλούστερης γέφυρας H. Τέτοιες συσκευές, φυσικά, αυξάνουν και την απόδοση των ηλιακών συλλεκτών, αλλά δεν το κάνουν πολύ αποτελεσματικά, αφού λειτουργούν μόνο εντός ενός άξονα. Αυτό το άρθρο περιγράφει ένα πολύ απλό ηλιακό σύστημα παρακολούθησης, το οποίο, ωστόσο, μπορεί να μετακινήσει το πάνελ σε δύο άξονες, γεγονός που αυξάνει την απόδοση της ηλιακής συστοιχίας. Κατά τη λειτουργία, το σύστημα προσπαθεί συνεχώς να τοποθετήσει τον πίνακα έτσι ώστε το επίπεδό του να είναι πάντα κάθετο στο προσπίπτον ηλιακό φως και να λαμβάνει τη μέγιστη επιστροφή ηλεκτρικής ενέργειας από την μπαταρία. Η συσκευή παρακολούθησης ακολουθεί τον ήλιο από την αυγή μέχρι τις τελευταίες ακτίνες του ηλιοβασιλέματος και ξαναρχίζει αυτόματα τη δουλειά της το επόμενο πρωί.
Διάγραμμα συσκευήςπεριέχει το τσιπ LM339, το οποίο είναι τέσσερις αναλογικοί συγκριτές σε μια κοινή συσκευασία. Δύο κινητήρες ελέγχονται από ένα εξειδικευμένο μικροκύκλωμα L293D - μια διπλή γέφυρα H. Εκτός από τα μικροκυκλώματα, το διάγραμμα κυκλώματος περιέχει πολλά διακριτά στοιχεία. Οι φωτοαντιστάσεις LDR1 - LDR4 χρησιμοποιούνται ως αισθητήρες έντασης φωτός, οι οποίοι καθορίζουν τη θέση του ηλιακού πάνελ σε σχέση με τις ακτίνες του ήλιου.
Το μπλοκ φωτοαντίστασης μαζί με τον συγκριτή LM339 παράγουν σήματα ελέγχου για τον οδηγό κινητήρα L293D. Οι φωτοαντιστάσεις LDR1 και LDR2 είναι στερεωμένες στις γωνίες του ηλιακού πάνελ στον άξονα Χ, στο LDR3 και στο LDR4 - στον άξονα Υ. επίπεδα χαμηλής τάσης.
Εξετάστε τον αλγόριθμο της εργασίαςσύστημα στο παράδειγμα του τμήματός του που είναι υπεύθυνο για την κίνηση κατά μήκος του άξονα Χ. Εάν η φωτοαντίσταση LDR2 δέχεται περισσότερο φως από το LDR1, τότε η αντίσταση του LDR2 γίνεται μικρότερη από την αντίσταση του LDR1. Ένα υψηλότερο επίπεδο τάσης εμφανίζεται στις εισόδους των συγκριτών A1 και Α2 (4, 7). Σε αυτήν την περίπτωση, εμφανίζεται ένα επίπεδο υψηλής τάσης στην έξοδο του συγκριτή A2 (1). Ο κινητήρας M1 αρχίζει να περιστρέφεται προς μία από τις κατευθύνσεις (ας πούμε, αριστερόστροφα), περιστρέφοντας το ηλιακό πάνελ.
Εάν το LDR1 δέχεται περισσότερο φως από το LDR2, τότε η αντίστασή του γίνεται μικρότερη από την αντίσταση του LDR2, μειώνοντας έτσι την τάση στις εισόδους του συγκριτή (4, 7). Στην έξοδο (2) του συγκριτή A2, εμφανίζεται ένα υψηλό επίπεδο και ο κινητήρας αρχίζει να περιστρέφεται προς την αντίθετη κατεύθυνση (ας πούμε, δεξιόστροφα). Η παρακολούθηση κατά μήκος του άξονα Υ λειτουργεί με τον ίδιο ακριβώς τρόπο.
Το παρακάτω σχήμα δείχνει έναν πιθανό σχεδιασμό ενός ηλιακού συστήματος παρακολούθησης. Το κύκλωμα μπορεί να συναρμολογηθεί σε μια ενιαία πλακέτα breadboard ή μια συμβατική πλακέτα τυπωμένου κυκλώματος μπορεί να δρομολογηθεί για αυτό.
Μετά τη χρήση ηλιακών συλλεκτών για την παραγωγή ηλεκτρικής ενέργειας σε βιομηχανική κλίμακα, μηχανικοί και σχεδιαστές άρχισαν να αναζητούν τρόπους για να αυξήσουν την απόδοση τέτοιων σταθμών παραγωγής ενέργειας. Η συνολική διασπορά του ηλιακού φωτός, η οποία καθορίζεται από την αλλαγή στην κατεύθυνση της πτώσης των ακτίνων του ήλιου στα φωτοκύτταρα, δεν επέτρεψε την αποτελεσματική χρήση των ηλιακών συλλεκτών καθ' όλη τη διάρκεια της ημέρας. Μια διέξοδος από αυτήν την κατάσταση βρέθηκε αρκετά γρήγορα - ηλιακά πάνελ άρχισαν να εγκαθίστανται σε μια κινητή βάση συνδεδεμένη με ένα ηλιακό σύστημα παρακολούθησης.
Όπως γνωρίζετε, για να αποκτήσετε τη μέγιστη ισχύ από τα ηλιακά πάνελ, είναι απαραίτητο οι ακτίνες του ήλιου να χτυπούν το επίπεδο των μπαταριών κάθετα. Με αυτή την κατεύθυνση των ακτίνων, η απόδοση των ηλιακών συλλεκτών μπορεί να φτάσει το 50-55%. Για μόνιμα εγκατεστημένες μπαταρίες, το ποσοστό αυτό μπορεί να μειωθεί στο 10-15% λόγω αλλαγών στη γωνία πρόσπτωσης του ηλιακού φωτός.
Η ηλιακή συσκευή παρακολούθησης αποτελείται από δύο κύρια μέρη:
1. Το σχήμα ελέγχου, που καθορίζει τη θέση του Ήλιου. Το απλούστερο διάγραμμα μιας ηλιακής συσκευής παρακολούθησης ή αλλιώς ενός ιχνηλάτη (Solar Tracker) φαίνεται παρακάτω. Για τον προσδιορισμό της θέσης του Ήλιου χρησιμοποιούνται δύο φωτοαντιστάσεις. Το σχέδιο περιλαμβάνει:
- Τσιπ λειτουργικού ενισχυτή LM1458 (K140UD20);
- τρανζίστορ BD139 (KT815G, KT961A) και BD140 (KT814G, KT626V).
- φωτοαντιστάσεις.
- δίοδοι 1N4004 (KD243G);
- αντιστάσεις και αντιστάσεις συντονισμού.

2. Μηχανισμοί περιστροφής και κλίσης μπαταριών ανάλογα με την κατεύθυνση των ακτίνων του ήλιου. Ο μηχανισμός κλίσης επιτρέπει τη χρήση τέτοιων συστημάτων παρακολούθησης σε οποιαδήποτε γεωγραφικά πλάτη: κατά την εγκατάσταση ηλιακών συλλεκτών σε περιοχή που αντιστοιχεί σε 320 βόρειο γεωγραφικό πλάτος, ο άξονας της συσκευής πρέπει να περιστρέφεται κατά 320 σε σχέση με τον ορίζοντα. Οι κινητήρες όλων των μηχανισμών του συστήματος παρακολούθησης κατασκευάζονται με βάση ηλεκτρικούς κινητήρες, οι οποίοι επηρεάζονται από το σύστημα ελέγχου. Οι ηλεκτροκινητήρες και το σύστημα ελέγχου τροφοδοτούνται από τους ίδιους τους ηλιακούς συλλέκτες, επομένως τέτοιες εγκαταστάσεις είναι αυτόνομες.
Όπως μπορείτε να δείτε, το σχέδιο και η συσκευή του ηλιακού ιχνηλάτη είναι αρκετά απλά. Φυσικά, χρησιμοποιούνται πιο πολύπλοκα συστήματα σε βιομηχανική κλίμακα, αλλά ένα παρόμοιο σχέδιο μπορεί να συναρμολογηθεί ανεξάρτητα για μια οικιακή εγκατάσταση για την παραγωγή ηλεκτρικής ενέργειας με βάση ηλιακούς συλλέκτες.

Το δίκτυο περιέχει μεγάλο αριθμό έτοιμων σχημάτων και λύσεων για συστήματα ηλιακής παρακολούθησης. Έτσι, εάν υπάρχει ανάγκη βελτίωσης του σχεδιασμού των ηλιακών συλλεκτών και αύξησης της απόδοσής τους, υπάρχει πάντα η ευκαιρία να το κάνετε μόνοι σας.
Ο ηλιακός ιχνηλάτης είναι ένα ηλεκτρονικό-μηχανικό σύστημα που έχει σχεδιαστεί για να στρέφει τα ηλιακά πάνελ προς τον Ήλιο. Το σύστημα παρακολουθεί τη θέση του Ήλιου στον ουρανό και ελέγχει έναν σερβομηχανισμό που περιστρέφει τα πάνελ προς την κατάλληλη κατεύθυνση. Η χρήση ενός τέτοιου ιχνηλάτη σάς επιτρέπει να έχετε τη μέγιστη απόδοση από τα ηλιακά πάνελ.
Οι περισσότεροι αυτοσχέδιοι ιχνηλάτες που βρίσκονται στο Διαδίκτυο συναρμολογούνται στο Arduino, οι φωτοαισθητήρες χρησιμοποιούνται για τον προσδιορισμό της θέσης του Ήλιου. Ανάλογα με το βαθμό φωτισμού και τη σχετική θέση των αισθητήρων φωτογραφίας, εκτελείται μια στροφή προς την κατεύθυνση του μέγιστου φωτισμού. Αυτή η μέθοδος έχει μειονεκτήματα: δεν είναι γνωστό πώς θα συμπεριφέρεται το σύστημα σε συννεφιασμένο καιρό. χαμηλή ατρωσία θορύβου όσον αφορά την απόκριση στο σεληνόφως και τις πηγές έντονου φωτός, καθώς και σε μεμονωμένα σύννεφα.
Λόγω των παραπάνω μειονεκτημάτων, ανέπτυξα τη δική μου έκδοση ενός οικονομικού ηλιακού ιχνηλάτη που λειτουργεί με σερβοκινητήρα που παρέχει παρακολούθηση του Ήλιου σε όλο τον ορατό ουρανό ανά πάσα στιγμή, ανεξάρτητα από τη γεωγραφική θέση.
Η θέση του Ήλιου στον ουρανό μπορεί να προσδιοριστεί όχι μόνο από τον φωτισμό των αισθητήρων φωτογραφίας, αλλά και από τους τύπους της ουράνιας μηχανικής με βάση τις γεωγραφικές συντεταγμένες του σημείου παρατήρησης και τον ακριβή χρόνο. Τώρα θα υπάρχουν πολλοί ορισμοί και τύποι που σχετίζονται με την ουράνια μηχανική, οπότε ετοιμαστείτε να τεντώσετε τις συνελίξεις σας). Για να δείξετε τα ηλιακά πάνελ, πρέπει να προσδιορίσετε τις οριζόντιες συντεταγμένες του Ήλιου, αυτό είναι το ύψος και το αζιμούθιο. Το κέντρο αυτού του συστήματος συντεταγμένων συμπίπτει με τη θέση του παρατηρητή, οι υπολογισμοί πραγματοποιούνται σε σχέση με το επίπεδο του μαθηματικού ορίζοντα.
Το ύψος h είναι η γωνία μεταξύ του επιπέδου του χαλιού. ορίζοντα και κατεύθυνση προς το φωτιστικό, μετρημένα από 0⁰ έως +90⁰ στο ζενίθ και από 0⁰ έως -90⁰ στο ναδίρ.
Αζιμούθιο Α - η γωνία μεταξύ της μεσημεριανής γραμμής (χονδρικά, η κατεύθυνση προς τα νότια) και της γραμμής τομής του επιπέδου ματ. ορίζοντα με το επίπεδο του κατακόρυφου κύκλου του φωτιστικού. Μετράται από το νότιο σημείο προς την κατεύθυνση της ημερήσιας περιστροφής της ουράνιας σφαίρας εντός 0⁰ ... 360⁰, ή από 0⁰ έως +180⁰ προς τα δυτικά και από 0⁰ έως −180⁰ προς τα ανατολικά. Οι οριζόντιες συντεταγμένες του άστρου αλλάζουν συνεχώς, λόγω της καθημερινής περιστροφής της Γης.
Παρακάτω είναι οι τύποι για τον υπολογισμό του ύψους και του αζιμουθίου του φωτιστικού:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ κόστος);
A = atan2 (συν
όπου δ είναι η απόκλιση του άστρου, t είναι η ωριαία γωνία του άστρου, ϕ είναι το γεωγραφικό πλάτος του σημείου παρατήρησης (0⁰…+90⁰ για το βόρειο ημισφαίριο, 0⁰…-90⁰ για το νότιο, 0⁰ είναι ο ισημερινός).
Αποκρυπτογράφηση της συνάρτησης atan2(y, x): 
Όπως μπορείτε να δείτε, για να υπολογίσετε τις οριζόντιες συντεταγμένες, είναι απαραίτητο να υπολογίσετε την απόκλιση και την ωριαία γωνία του αστεριού. Αυτές οι συντεταγμένες αναφέρονται στο πρώτο ισημερινό σύστημα συντεταγμένων, όπου το κύριο επίπεδο είναι το επίπεδο του ουράνιου ισημερινού.
Απόκλιση δ - η γωνία μεταξύ του επιπέδου του ουράνιου ισημερινού και της κατεύθυνσης προς το φωτιστικό, μετράται από 0⁰ έως +90⁰ προς τον βόρειο πόλο και από 0⁰ έως -90⁰ προς το νότιο πόλο.
Η ωριαία γωνία t είναι η δίεδρη γωνία μεταξύ του επιπέδου του ουράνιου μεσημβρινού και του κύκλου απόκλισης του φωτιστικού. Μετράται προς την κατεύθυνση της ημερήσιας περιστροφής της ουράνιας σφαίρας, στα δυτικά του ανώτερου σημείου του ουράνιου ισημερινού, εντός 0⁰ ... 360⁰, ή από τις 00:00 έως τις 24:00 (ωριαία). Επίσης, η ωριαία γωνία μπορεί να μετρηθεί από 0⁰ έως 180⁰ (από τις 00:00 έως τις 12:00) προς τα δυτικά και από 0⁰ έως −180⁰ (από 00:00 έως -12:00) προς τα ανατολικά. Η γωνία ώρας είναι ίση με 0 τη στιγμή της ανώτερης κορύφωσης του άστρου, για τον Ήλιο το πραγματικό μεσημέρι (όχι πάντα την ίδια ώρα όταν το ρολόι δείχνει 12:00 τοπική ώρα).
Η απόκλιση του Ήλιου αλλάζει καθ' όλη τη διάρκεια του έτους (άνισα) από -23,43⁰ σε +23,43⁰, λόγω της τροχιακής κίνησης της Γης γύρω από τον Ήλιο, και δεν σχετίζεται με την καθημερινή περιστροφή της Γης. Για να προσδιορίσετε την απόκλιση του Ήλιου για οποιαδήποτε ημέρα του έτους, ο ευκολότερος τρόπος είναι από τον πίνακα με τις μέσες τιμές απόκλισης για έναν κύκλο 4 ετών. Μπορείτε να κατεβάσετε τον πίνακα στο τέλος του άρθρου.
Η ωριαία γωνία του άστρου αλλάζει κατά τη διάρκεια της ημέρας (λόγω της ημερήσιας περιστροφής της Γης), μπορεί να υπολογιστεί, γνωρίζοντας την πραγματική ηλιακή ώρα:
t \u003d Ts.ist - 12:00 h, (-12:00 ... + 11:59),
όπου Ts.ist είναι η πραγματική ηλιακή ώρα (00:00…23:59h).
Η πραγματική ηλιακή ώρα μπορεί να υπολογιστεί γνωρίζοντας την τοπική ώρα, τη ζώνη ώρας και το γεωγραφικό μήκος του σημείου παρατήρησης:
Ts.ist = Ts.av + EOT, ή Ts.ist = UTC + λ + EOT,
όπου Ts.av είναι ο μέσος ηλιακός χρόνος σε κάποιο σημείο της Γης (εξαρτάται από το γεωγραφικό μήκος του σημείου), UTC είναι ο καθολικός συντονισμένος χρόνος, λ είναι το γεωγραφικό μήκος του σημείου παρατήρησης σε μονάδες ώρας, EOT είναι η εξίσωση του χρόνου.
Η συντονισμένη παγκόσμια ώρα μπορεί να υπολογιστεί από την τοπική ώρα (Tm) και τη ζώνη ώρας (N): UTC = Tm – N. Το γεωγραφικό μήκος λ μετράται από 0⁰ έως 180⁰ ανατολικά του πρώτου μεσημβρινού (ανατολικό γεωγραφικό μήκος) και από 0⁰ έως -180⁰ προς τα δυτικά (δυτικό γεωγραφικό μήκος). Κατά την αντικατάσταση στον παραπάνω τύπο, το γεωγραφικό μήκος πρέπει να μετατραπεί σε μονάδες ώρας (1⁰ = 4 λεπτά).
Η εξίσωση χρόνου EOT δείχνει τη διαφορά μεταξύ του μέσου ηλιακού χρόνου και του πραγματικού ηλιακού χρόνου, καθώς η ημερήσια κίνηση του Ήλιου είναι άνιση λόγω της ελλειπτικότητας της τροχιάς της Γης, καθώς και της κλίσης του άξονα της Γης προς το εκλειπτικό επίπεδο:
EOT = 9,87 ∙ sin2B - 7,53 ∙ cosB - 1,5 ∙ sinB,
όπου B = (360⁰ (N-81))/365, N είναι ο τακτικός αριθμός της ημέρας του έτους.
Έτσι, κατά τη διάρκεια του έτους, η τιμή της εξίσωσης του χρόνου αλλάζει από -14,3 λεπτά σε +16,4 λεπτά.
Ακολουθεί ένα γράφημα του τρόπου με τον οποίο αλλάζει η εξίσωση του χρόνου κατά τη διάρκεια ενός έτους: 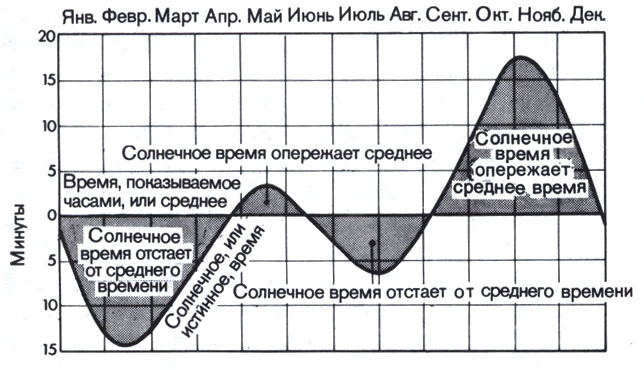
Έπρεπε να οδηγήσω όλους αυτούς τους υπολογισμούς στο πρόγραμμα μικροελεγκτή, δεν τολμούσα να γράψω στο assembler, οπότε άρχισα να μελετώ το SI, έπρεπε να ασχολούμαι με τύπους και υπολογισμούς για εβδομάδες για να πάρω το σωστό αποτέλεσμα, μελετώντας το SI στην πορεία. Ως αποτέλεσμα, κατάφερα να γράψω ένα πρόγραμμα εργασίας, ενώ το σφάλμα υπολογισμού δεν υπερβαίνει το ±1⁰.
Ο ηλιακός ιχνηλάτης σχεδιάστηκε για μια μικρή ηλιακή μπαταρία με ισχύ 2W και τάση 6V για τη φόρτιση μιας μπαταρίας ιόντων λιθίου, αλλά είναι καλύτερο να χρησιμοποιήσετε μια πιο ισχυρή μπαταρία τουλάχιστον 4W. Ως ηλεκτροκινητήρες, χρησιμοποίησα σερβομηχανισμούς MG996R (μπορείτε να αγοράσετε στην Κίνα, ο σύνδεσμος δίνεται στο τέλος του άρθρου). Επιπλέον, αγόρασα ειδικούς βραχίονες για τη συναρμολόγηση μιας εγκατάστασης alt-azimuth (σύνδεσμος για παραγγελία στο τέλος του άρθρου). Ο συναρμολογημένος σχεδιασμός σας επιτρέπει να προσανατολίσετε την ηλιακή μπαταρία σε ύψος και αζιμούθιο, ενώ ο σερβομηχανισμός αζιμουθίου είναι ακίνητος και περιστρέφει τον σερβο ύψους μαζί με τους βραχίονες.
Παρακάτω είναι ένα διάγραμμα του ηλιακού ιχνηλάτη: ![]()
Το κύκλωμα βασίζεται στον μικροελεγκτή PIC16F876A, ο οποίος διαθέτει σημαντική ποσότητα μνήμης και περιέχει πολλές περιφερειακές μονάδες. Ολόκληρη η δομή τροφοδοτείται από μια μπαταρία Li-ion, η οποία φορτίζεται ανάλογα από μια ηλιακή μπαταρία μέσω μιας μονάδας που βασίζεται στο τσιπ TP4056, αυτός είναι ένας εξειδικευμένος ελεγκτής φόρτισης για μπαταρίες Li-ion (σύνδεσμος παραγγελίας στο τέλος του άρθρου) . Για τον προσδιορισμό της τρέχουσας ώρας και ημερομηνίας, το σχήμα χρησιμοποιεί μια ενότητα (σύνδεσμος για παραγγελία στο τέλος του άρθρου). Το ρολόι είναι αρκετά ακριβές, η χρονική μετατόπιση είναι ± 2 λεπτά το χρόνο, έγραψα ήδη ένα λεπτομερές άρθρο γι 'αυτά, όσοι επιθυμούν μπορούν να εξοικειωθούν. Για την εμφάνιση των παραμέτρων, χρησιμοποιείται μια ψηφιακή ένδειξη (σύνδεσμος για παραγγελία στο τέλος του άρθρου).
Η μέγιστη τάση στην μπαταρία ιόντων λιθίου δεν υπερβαίνει τα 4,1 V, κάτι που δεν επαρκεί για την τροφοδοσία των σερβομηχανισμών, επομένως στο κύκλωμα προστέθηκε μια μονάδα step-up βασισμένη στο τσιπ MT3608 (σύνδεσμος παραγγελίας στο τέλος του άρθρου ). Η ελάχιστη τάση εισόδου της μονάδας είναι 2V, το μέγιστο ρεύμα φορτίου είναι 2Α, η μονάδα έχει μια μεταβλητή αντίσταση πολλαπλών περιστροφών για τη ρύθμιση της τάσης εξόδου. Για εξοικονόμηση ενέργειας, η ισχύς στους σερβομηχανισμούς δεν παρέχεται συνεχώς, αλλά μόνο για την αλλαγή της θέσης του άξονα. Η εναλλαγή τροφοδοσίας γίνεται χρησιμοποιώντας ένα τρανζίστορ πεδίου επίδρασης καναλιού p VT1, η μονάδα μετατροπέα ελέγχεται επίσης από τον μικροελεγκτή.
Η πλακέτα της μονάδας δεν παρέχει επαφή για έλεγχο, επομένως είναι απαραίτητο να κολλήσετε επιπλέον το καλώδιο στην 4η ακίδα του τσιπ MT3608, αυτή είναι η είσοδος ενεργοποίησης / απενεργοποίησης του μετατροπέα. Στην πλακέτα, αυτός ο πείρος συνδέεται με το τροφοδοτικό "+", πρώτα πρέπει να κόψετε τις κατάλληλες διαδρομές για αυτόν τον πείρο (για αυτό θα πρέπει να ξεκολλήσετε το μικροκύκλωμα) ή να σηκώσετε τον πείρο πάνω από την πλακέτα. Ένα τσιπ αντίστασης διαιρέτη τάσης είναι εγκατεστημένο στην πλακέτα της μονάδας, η αύξηση της αντίστασης αυτής της αντίστασης θα μειώσει επίσης την κατανάλωση σε κατάσταση αναστολής λειτουργίας, το αντικατέστησα με ένα άλλο, με αντίσταση 9,1 kOhm, αρχικά ήταν 2,2 kOhm. Μετά την αντικατάσταση, πρέπει να ρυθμίσετε την τάση εξόδου σε περίπου 5-5,5 V για να τροφοδοτήσετε τους σερβομηχανισμούς, όπως φαίνεται παρακάτω: 
Η μονάδα ρολογιού πρέπει επίσης να βελτιωθεί, για να μειώσετε την κατανάλωση ενέργειας, πρέπει να κολλήσετε το τσιπ μνήμης 24c32, το LED "POWER", καθώς και την αντίσταση (200 Ohm), μέσω της οποίας τροφοδοτείται η εξωτερική τάση τροφοδοσίας στην μπαταρία , γιατί οι Κινέζοι το έκαναν αυτό παραμένει ακατανόητο, επειδή η μπαταρία δεν προορίζεται για φόρτιση, δείτε την παρακάτω εικόνα: 
Η λυχνία LED HL1 έχει ρυθμιστεί να υποδεικνύει ένα σφάλμα επικοινωνίας με το ρολόι DS3231 (μέσω της διεπαφής I2C), η λυχνία LED αρχίζει να αναβοσβήνει εάν δεν υπάρχει απόκριση από το ρολόι.
Η συναρμολόγηση της ρύθμισης alt-azimuth θα πρέπει να ξεκινήσει όταν οι σερβομηχανισμοί έχουν ρυθμιστεί στη μεσαία θέση, αυτό συμβαίνει όταν η συσκευή ενεργοποιηθεί για πρώτη φορά, η ένδειξη θα εμφανίσει την επιγραφή "Cent". Είναι επιθυμητό να τοποθετήσετε το σερβο αζιμουθίου σε μια πλάκα που θα χρησιμεύσει ως βάση της εγκατάστασης, ή σε μια βάση, έτσι ώστε ο άξονας εξόδου να κατευθύνεται κατακόρυφα προς τα πάνω. Στη συνέχεια, πρέπει να συνδέσετε το στήριγμα σερβομηχανισμού ύψους, πρώτα πρέπει να βιδώσετε το συρόμενο χιτώνιο στο στήριγμα και μετά το χιτώνιο του προσαρμογέα. Το στήριγμα πρέπει να ρυθμιστεί κάθετα στη μακριά πλευρά του σερβομηχανισμού αζιμουθίου, όπως φαίνεται στη φωτογραφία: 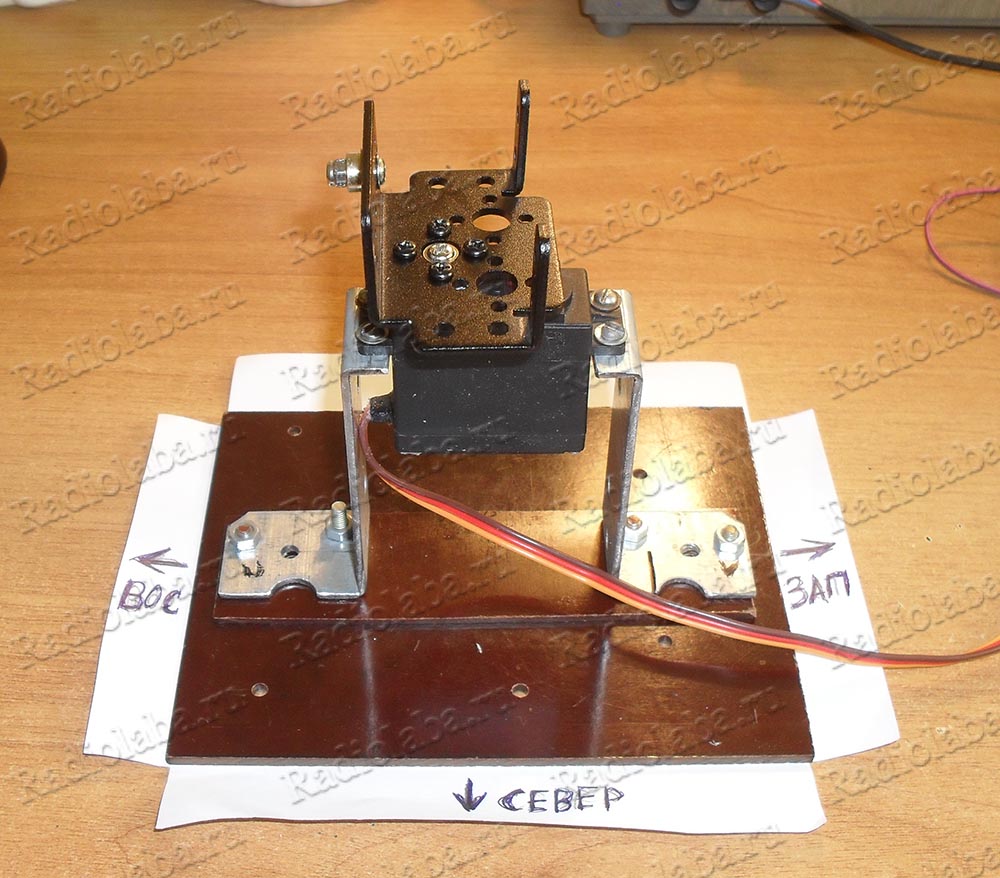
Κατά τη συναρμολόγηση, είναι δύσκολο να επιτευχθεί μια κάθετη θέση, αλλά αυτό δεν είναι απαραίτητο, αποκλίσεις εντός ± 5-10 μοιρών είναι αποδεκτές. Στο μέλλον, η προσαρμογή λογισμικού θα εξαλείψει αυτήν την απόκλιση.
Μετά τη στερέωση του σερβομηχανισμού ύψους, απομένει να στερεώσετε το στήριγμα φορέα, πρώτα δοκιμάστε το χιτώνιο προσαρμογέα στον άξονα του σερβομηχανισμού, επιλέξτε μια θέση έτσι ώστε το στήριγμα φορέα μετά την εγκατάσταση να κατευθύνεται κατακόρυφα προς τα πάνω. Και πάλι, δεν είναι απαραίτητο να ορίσετε την ακριβή θέση, όπως είπα νωρίτερα. Μια γενική άποψη της εγκατάστασης φαίνεται στην παρακάτω φωτογραφία: 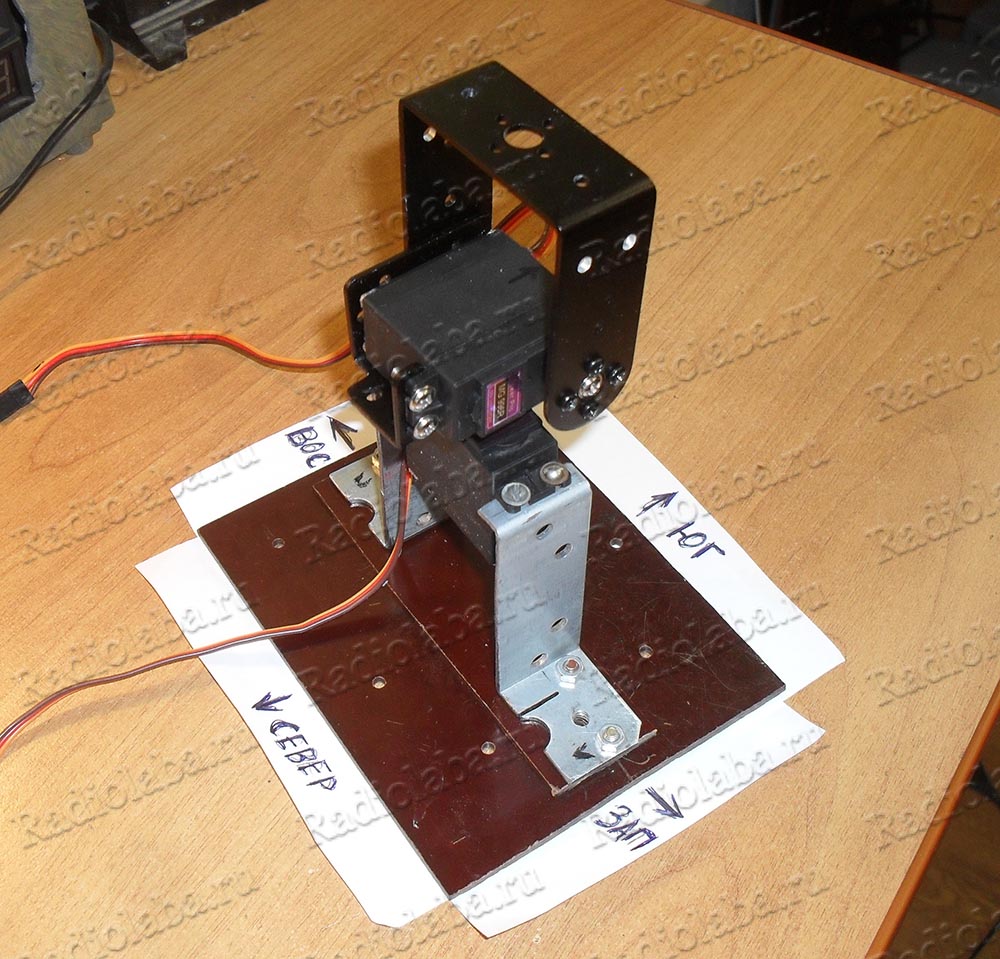
Ακολουθεί η διαδικασία για τη ρύθμιση των ακραίων θέσεων των σερβομηχανισμών. Η ρύθμιση πρέπει να εκτελείται σε επίπεδη επιφάνεια, όταν ο σερβοκεντρικός άξονας είναι αζιμουθιακά κατακόρυφος (ο άξονας περιστροφής κατευθύνεται κατά μήκος μιας γραμμής βάθους). Αφού πατήσετε το κουμπί "Enter", ο βραχίονας στήριξης στρέφεται προς τον Βορρά υπό όρους και παίρνει οριζόντια θέση (η επιγραφή "βόρεια" εμφανίζεται στην ένδειξη): 
Εάν υπάρχει απόκλιση από την οριζόντια, τότε πρέπει να προσαρμόσετε τη θέση του βραχίονα χρησιμοποιώντας τα κουμπιά "Set" και "Discharge". Έτσι, ρυθμίζεται η ακραία θέση του σερβομηχανισμού. Περαιτέρω, όταν πατηθεί το κουμπί «Enter», η αγκύλη στρέφεται προς τον υπό όρους Νότο (στον δείκτη αναγράφεται το South). Εάν είναι απαραίτητο, ρυθμίστε την οριζόντια θέση του βραχίονα όπως περιγράφεται παραπάνω.
Πατώντας περαιτέρω το κουμπί «Enter» θα γυρίσει ο βραχίονας προς τη συμβατική Ανατολή (στην ένδειξη υπάρχει μια επιγραφή EASt). Τα κουμπιά "Set" και "Discharge" διορθώνουν την κατεύθυνση, ενώ είναι βολικό να εστιάσετε στο σώμα του σερβοκινητήρα αζιμουθίου, είναι απαραίτητο ο βραχίονας να κατευθύνεται κατά μήκος της μακριάς πλευράς του σώματος, όταν το βλέπετε από πάνω: 
Την επόμενη φορά που θα πατήσετε το κουμπί "Enter", το στήριγμα θα στρίψει προς τα δυτικά (η ένδειξη δείχνει την επιγραφή WEST), η ρύθμιση πραγματοποιείται όπως περιγράφεται παραπάνω.
Ως αποτέλεσμα της διόρθωσης, ο βραχίονας περιστρέφεται σε ύψος και αζιμούθιο εντός 180⁰, οι τιμές διόρθωσης αποθηκεύονται στη μνήμη EEPROM του μικροελεγκτή. Αφού πατήσετε το κουμπί «Enter», η αγκύλη θα πάρει τη διορθωμένη κατεύθυνση προς τον υπό όρους Νότο. Για τον σωστό προσανατολισμό της ηλιακής μπαταρίας, η κατεύθυνση προς τον υπό όρους Νότο θα πρέπει να υποδεικνύει το πραγματικό σημείο του Νότου στη δεδομένη περιοχή και ο άξονας μετάδοσης κίνησης σερβομηχανισμού σε αζιμούθιο βρίσκεται κατακόρυφα κατά μήκος μιας γραμμής βάθους.
Αφού πατήσετε ξανά το κουμπί "Enter", θα πρέπει να ρυθμίσετε την ώρα, την ημερομηνία, τη ζώνη ώρας, τις συντεταγμένες τοποθεσίας και τη διάρκεια της κατάστασης ύπνου. Αντίστοιχα, για κάθε παράμετρο, εμφανίζονται οι ακόλουθες επιγραφές στην ένδειξη:
– τοπική ώρα, από προεπιλογή 0 h 0 min.
– γεωγραφικό μήκος τοποθεσίας, από προεπιλογή -0 μοίρες. 0 λεπτά. (για το δυτικό γεωγραφικό μήκος, τίθεται το σύμβολο μείον "-").
– γεωγραφικό πλάτος τοποθεσίας, από προεπιλογή -0 μοίρες. 0 λεπτά. (για το νότιο γεωγραφικό πλάτος, τίθεται το σύμβολο μείον "-").
– ζώνη ώρας, από προεπιλογή -0, (για δυτικό γεωγραφικό μήκος τίθεται το σύμβολο μείον "-").
– διάρκεια λειτουργίας ύπνου, προεπιλογή 1 λεπτό.
Τα κουμπιά "Discharge" και "Set" ορίζουν τις τιμές των παραμέτρων, όταν πατηθεί το κουμπί "Enter", οι τιμές ώρας και ημερομηνίας γράφονται σε , οι υπόλοιπες παράμετροι αποθηκεύονται στη μνήμη EEPROM του μικροελεγκτή. Αφού εισαγάγετε όλες τις παραμέτρους, η ένδειξη εμφανίζει την επιγραφή SUCCES (για 1 δευτερόλεπτο, μετά σβήνει ο δείκτης), και στη συνέχεια η εγκατάσταση στοχεύει στον Ήλιο, σύμφωνα με τις εισαγόμενες παραμέτρους.
Για εξοικονόμηση ενέργειας, η στόχευση στον Ήλιο εκτελείται μετά από ένα ορισμένο χρονικό διάστημα, το οποίο ρυθμίζεται στην παράμετρο διάρκειας λειτουργίας ύπνου. Μετά την κατάδειξη, οι σερβομηχανισμοί απενεργοποιούνται, ο μικροελεγκτής μπαίνει σε κατάσταση αναστολής λειτουργίας, η συνολική κατανάλωση του tracker μειώνεται στα 160 μA. Η διάρκεια του «ύπνου» μπορεί να ρυθμιστεί μέσα σε 1-255 λεπτά.
Όταν ο ιχνηλάτης ενεργοποιηθεί ξανά (μετά την απενεργοποίηση), ελέγχεται πρώτα η μνήμη EEPROM, εάν οι αποθηκευμένες παράμετροι είναι σωστές, ο ιχνηλάτης συνεχίζει να παρακολουθεί τον Ήλιο, ενώ η ψηφιακή ένδειξη παραμένει σε κατάσταση αναστολής λειτουργίας και δεν ανάβει σε εξοικονόμησε ενέργεια. Μπορείτε γενικά να απενεργοποιήσετε την τροφοδοσία της ένδειξης μετά την αρχική εισαγωγή των παραμέτρων. Για να εισέλθετε ξανά στη λειτουργία διόρθωσης, πρέπει να κρατήσετε πατημένο το κουμπί "Set" και να ενεργοποιήσετε το tracker. Εάν οι παράμετροι που διαβάζονται από το EEPROM είναι λανθασμένες ή λείπουν, θα εισέλθει επίσης στη λειτουργία διόρθωσης.
Πρόσθεσα επιπλέον τη λειτουργία εξόδου των κύριων παραμέτρων μέσω της διεπαφής UART στο πρόγραμμα μικροελεγκτή. Μετά τον υπολογισμό της θέσης του Ήλιου, ο μικροελεγκτής μεταδίδει την τρέχουσα τιμή της ώρας, της ημερομηνίας, του σειριακού αριθμού της ημέρας, των συντεταγμένων τοποθεσίας που εισήχθησαν κατά τη ρύθμιση, καθώς και τις τρέχουσες τιμές του ύψους και του αζιμουθίου του Ήλιου. Κάθε παράμετρος ξεκινά με το σύμβολο "$" και τελειώνει με τα σύμβολα "\r", "\n". Αυτά τα δεδομένα μπορούν να προβληθούν σε υπολογιστή συνδέοντας τον ιχνηλάτη μέσω προσαρμογέα USB-UART. Στις ρυθμίσεις του προγράμματος τερματικού, πρέπει να ορίσετε τις ακόλουθες ρυθμίσεις: ρυθμός baud 9600 bps, 8 bit δεδομένων, ένα bit stop. Ακολουθεί ένα στιγμιότυπο οθόνης από το πρόγραμμα τερματικού: ![]()
Οι σερβομηχανισμοί MG996R δεν προστατεύονται από την υγρασία στο εσωτερικό της θήκης, επομένως σε περίπτωση χρήσης σε εξωτερικό χώρο, οι σερβομηχανισμοί πρέπει να είναι σφραγισμένοι. Αφαιρέστε τα τέσσερα μπουλόνια από την κάτω πλευρά της θήκης και εφαρμόστε ουδέτερο στεγανωτικό σιλικόνης μεταξύ των αρμών της θήκης και εφαρμόστε στεγανωτικό γύρω από τη μανσέτα για να εισέλθουν τα καλώδια στη θήκη. Μπορείτε επιπλέον να απλώσετε γράσο στα γρανάζια του κιβωτίου ταχυτήτων, αφού το εργοστασιακό πρακτικά απουσιάζει. Σύμφωνα με κριτικές, το γράσο SHRUS-4 ταιριάζει καλύτερα, σε αντίθεση με τη λιθόλη, δεν παγώνει στο κρύο. Για να σφραγιστεί η επάνω οπή, μπορεί να τοποθετηθεί ένας δακτύλιος σιλικόνης στον άξονα εξόδου και η λοξότμηση πρέπει να αφαιρεθεί από τον προσαρμογέα, ο οποίος είναι εγκατεστημένος στον άξονα, ώστε να μην δημιουργηθεί υπερβολική τριβή.
Στερέωσα μια ορθογώνια πλάκα από textolite στο στήριγμα στήριξης, πάνω στο οποίο κόλλησα την ηλιακή μπαταρία χρησιμοποιώντας ταινία διπλής όψης. Δεδομένου ότι οι σερβομηχανισμοί απενεργοποιούνται τις περισσότερες φορές, είναι δυνατή η περιστροφή του άξονα σε ύψος υπό την επίδραση της βαρύτητας της ηλιακής συστοιχίας. Για να το αποφύγω αυτό, προσάρτησα μακριά αντίβαρα από γωνίες και πλάκες στις πλευρές του βραχίονα φορέα. Αλλάζοντας τη μάζα των αντίβαρων, ισορροπούσα τη δομή κατά τον άξονα περιστροφής του ύψους.
Ο ιχνηλάτης εκτελεί καθοδήγηση όταν ο Ήλιος βρίσκεται πάνω από τον ορίζοντα, δηλαδή όταν το ύψος του είναι μεγαλύτερο από 0⁰. Όταν ο Ήλιος δύει κάτω από τον ορίζοντα (αρνητική τιμή υψομέτρου), ο ιχνηλάτης κατευθύνει την ηλιακή συστοιχία προς την Ανατολή, και η περαιτέρω παρακολούθηση συνεχίζεται με την ανατολή του ηλίου. Η παρακολούθηση εκτελείται σε ολόκληρη την ορατή περιοχή του ουρανού.
Η καθημερινή κίνηση του Ήλιου και των αστεριών μπορεί να προβληθεί σε έναν υπολογιστή στο πρόγραμμα Stellarium, ένα δωρεάν εικονικό πλανητάριο που εμφανίζει έναν ρεαλιστικό έναστρο ουρανό. Το πρόγραμμα εμφανίζει την κίνηση των φωτιστικών στον ουρανό, μπορείτε να δείτε τη θέση του Ήλιου και των αστεριών ανά πάσα στιγμή, είναι επίσης διαθέσιμα δεδομένα για διάφορες συντεταγμένες.
Τοποθέτησα τη συσκευή σε μια πλακέτα τυπωμένου κυκλώματος που σχεδίασα για να ταιριάζει στη θήκη GAINTA G1202G. Η πλακέτα έχει θέση για jumper (jumper), με την οποία μπορείτε να απενεργοποιήσετε την ισχύ της ψηφιακής ένδειξης.
Το τρανζίστορ εφέ πεδίου VT1 μπορεί να αντικατασταθεί με IRLML2244, IRLML6402. Μπορείτε επίσης να χρησιμοποιήσετε τρανζίστορ στη συσκευασία SOIC-8 (θα πρέπει να επαναλάβετε την πλακέτα): IRF9332, IRF9310, IRF9317.
Σε αρνητικές θερμοκρασίες, οι μπαταρίες Li-ion χάνουν σημαντική χωρητικότητα (ο ηλεκτρολύτης παγώνει), δεν συνιστάται η χρήση μπαταριών σε θερμοκρασίες κάτω των +5 ⁰C, καθώς αυτό οδηγεί σε πρόωρη μείωση του πόρου. Επομένως, εάν σκοπεύετε να χρησιμοποιήσετε τον ιχνηλάτη σε παγωμένο καιρό, είναι προτιμότερο να χρησιμοποιήσετε μια μπαταρία λιθίου-σιδήρου-φωσφορικού άλατος LiFePO4. Οι μπαταρίες αυτού του τύπου είναι πιο ανθεκτικές στον παγετό, το εύρος θερμοκρασίας λειτουργίας είναι από -30 ⁰C έως +55 ⁰C, η μέγιστη τάση είναι 3,65 V, η ελάχιστη είναι 2 V, ο μέσος όρος είναι 3,3 V, δηλαδή χαμηλότερη από αυτή του Li -ιόν. Επίσης, τα πλεονεκτήματα περιλαμβάνουν σταθερή τάση εκφόρτισης κοντά στα 3,2V. Στο τέλος του άρθρου υπάρχουν σύνδεσμοι για παραγγελία μπαταρίας, καθώς και μονάδα φόρτισης.
Με βάση έναν ηλιακό ιχνηλάτη, μπορείτε να δημιουργήσετε ένα μικρό αυτόνομο σύστημα που δεν απαιτεί εξωτερική τροφοδοσία, όπως έναν απομακρυσμένο μετεωρολογικό σταθμό ή ένα σύστημα ασφαλείας για εξοχική κατοικία κ.λπ. Μπορείτε να αντικαταστήσετε τους σερβομηχανισμούς με πιο ισχυρούς και να εγκαταστήσετε ένα μεγαλύτερο ηλιακό πάνελ. Είναι δυνατό να προσαρμόσετε το κύκλωμα για ηλιακούς συλλέκτες στα 12, 18 V, για να φορτίσετε πολλές μπαταρίες συνδεδεμένες σε σειρά, αλλά για αυτό θα πρέπει να αλλάξετε το κύκλωμα και να χρησιμοποιήσετε άλλες μονάδες φόρτισης.
Παρακάτω υπάρχουν σύνδεσμοι για παραγγελία μονάδων και εξαρτημάτων για τη συναρμολόγηση ενός ηλιακού ιχνηλάτη:
Ηλιακή μπαταρία 6V 4,5W
Μονάδα ρολογιού πραγματικού χρόνου DS3231
Ψηφιακή ένδειξη στο πρόγραμμα οδήγησης MAX7219
Μονάδα φόρτισης μπαταρίας Li-ion στο TP4056
Μπαταρία LiFePO4 6500mah
Μπαταρία LiFePO4 1800mah
Μονάδα φόρτισης μπαταρίας LiFePO4
Servo MG996R
Στηρίγματα για συναρμολόγηση εγκατάστασης alt-azimuth για σερβομηχανισμούς MG996R
Μετατροπέας ενίσχυσης σε MT3608
![]()
![]()
![]()
![]()
![]()
![]()
Αρχικά, αξίζει πιθανώς να πούμε τι σημαίνει αυτό το άρθρο με έναν ηλιακό ιχνηλάτη. Εν ολίγοις, η συσκευή είναι μια κινητή βάση για ένα ηλιακό πάνελ, το οποίο είναι απαραίτητο ώστε στα εύκρατα γεωγραφικά πλάτη μας το πάνελ να συλλέγει επαρκή ποσότητα φωτός, αλλάζοντας τη θέση του ακολουθώντας τον ήλιο.
Σε αυτή την περίπτωση, το πρωτότυπο ηλιακό ιχνηλάτη συναρμολογήθηκε με βάση το Arduino. Για την περιστροφή της πλατφόρμας στον οριζόντιο και τον κάθετο άξονα, χρησιμοποιούνται σερβομηχανισμοί, η γωνία περιστροφής των οποίων εξαρτάται από την ισχύ του φωτός που προσπίπτει στις φωτοαντιστάσεις. Ως σώμα χρησιμοποιείται ο αγαπημένος σοβιετικός μεταλλικός κατασκευαστής όλων.
Θα ήταν χρήσιμο να αναφέρω ότι όλα αυτά έγιναν ως πρόγραμμα μαθημάτων, οπότε δεν μπήκα στον κόπο να αγοράσω και να τοποθετήσω τον ίδιο τον ηλιακό και την μπαταρία, καθώς η παρουσία τους δεν σχετίζεται με τη δουλειά του tracker. Ως δικαιολογία, μπορώ να πω ότι οι δυνατότητες του σοβιετικού μεταλλικού κατασκευαστή είναι τεράστιες, οπότε το να βιδώσετε ένα μικρό ηλιακό πάνελ για να φορτίσετε το τηλέφωνο δεν θα είναι δύσκολο αν προκύψει μια τέτοια επιθυμία.
Λοιπόν, τι χρησιμοποιήθηκε στη συναρμολόγηση:
Ο ομιλητής, ο οποίος εμφανίστηκε ξαφνικά στη λίστα, έπρεπε να ενισχύσει το εφέ υψηλής τεχνολογίας. Το γεγονός είναι ότι οι σερβομηχανισμοί μπορούν να περιστρέφονται μόνο 180 μοίρες και δεν χρειαζόμαστε περισσότερα, δεδομένου ότι ακολουθούμε τον ήλιο. Αλλά κατά τη δοκιμή του έργου, όταν δεν μπορείτε πραγματικά να ακολουθήσετε τον ήλιο για δύο λεπτά της επίδειξης, αποδείχθηκε ότι θα ήταν ωραίο να σηματοδοτήσετε σε ποιο σημείο αξίζει να σταματήσετε να κουνάτε τον φακό, επειδή ο σερβομηχανισμός έφτασε στους νεκρούς ζώνη. Για αυτό προστέθηκε η παραπάνω πρόσκληση.
Λοιπόν, ας αρχίσουμε να συλλέγουμε τον ιχνηλάτη. Αρχικά, ας χωρίσουμε το επερχόμενο μέτωπο εργασίας σε τέσσερα στάδια υπό όρους: συναρμολόγηση της βάσης για ηλιακούς συλλέκτες και τοποθέτηση σερβομηχανισμών, τοποθέτηση φωτοευαίσθητων στοιχείων στη συναρμολογημένη δομή, συγκόλληση και εγγραφή κώδικα για το Arduino.
Οι φωτοαντιστάσεις είναι αρκετά ασφαλείς προσαρτημένες στο σώμα, το μόνο με το οποίο αξίζει να δουλέψουμε είναι η ακρίβεια της θέσης τους στην πλατφόρμα: τώρα δεν κοιτούν αρκετά κάθετα, κάτι που μπορεί να αναστατώσει τους τελειομανείς και να χαλάσει ελαφρώς την ακρίβεια της περιστροφής.
Λίγο κύκλωμα: η σύνδεση των φωτοευαίσθητων στοιχείων πραγματοποιείται σύμφωνα με το κύκλωμα διαιρέτη τάσης, για το οποίο απαιτούνταν οι αντιστάσεις εξόδου που υποδεικνύονται στη λίστα στοιχείων. Όλες οι φωτοαντιστάσεις συγκολλούνται σε μια κοινή ακίδα συνδεδεμένη με την έξοδο ισχύος πέντε βολτ του Arduino. Για ευκολία και αισθητική, τα πόδια των φωτοαντιστάσεων συγκολλούνται στις επαφές δύο μονωμένων συρμάτων τριών πυρήνων (μία επαφή παρέμεινε αχρησιμοποίητη και κρυμμένη). Όλες οι λεπτομέρειες του κυκλώματος φαίνονται στο παρακάτω διάγραμμα.




Ο κώδικας
#περιλαμβάνω

Το κανάλι "bang-bang" έδειξε πώς να φτιάξετε έναν σπιτικό ηλιακό ιχνηλάτη για πάνελ. Θα περιστρέφονται αυτόματα μετά τον ήλιο, αυξάνοντας την απόδοση του σταθμού παραγωγής ενέργειας.
Θα χρειαστείτε δύο ηλιακούς συλλέκτες χωρητικότητας 3,5 Watt το καθένα. Στην έξοδο, το ένα έχει περισσότερα από 6 βολτ, τα οποία, όταν συνδεθούν δύο μπαταρίες σε σειρά, θα δώσουν περισσότερα από 12 βολτ. Υποδοχή USB στο πίσω μέρος. Τρεις έξοδοι από τρία τμήματα μπαταρίας. Καθένα από τα οποία παράγει 2 βολτ. Δηλαδή, αν χρειαστεί, μπορείτε να συνδέσετε ανάλογα και να πάρετε 2, 4, 6 βολτ.

Ο επόμενος σημαντικός κόμβος είναι δύο σερβομηχανισμοί. Το ένα θα περιστρέφει την ηλιακή συστοιχία οριζόντια και το άλλο κάθετα. Αυτοί οι δίσκοι δεν είναι απλοί, δεν είναι τόσο εύκολο να περιστραφούν. Χρειάζεται κάποια βελτίωση. Στο σετ με κάθε έναν από τους κινητήρες υπάρχουν πλαστικοί σταυροί, δίσκοι, βίδες για στερέωση. Αγορασμένα στηρίγματα για τον κινητήρα. Περιλαμβάνονται επίσης βίδες στερέωσης, ρουλεμάν και δίσκοι. ελεγκτής φόρτισης. Θα λαμβάνει ενέργεια από τα ηλιακά πάνελ και θα τη μεταφέρει στην μπαταρία.
Ας αρχίσουμε να δουλεύουμε με τα χέρια μας με το ηλεκτρονικό γέμισμα. Το διάγραμμα παρακολούθησης για το ηλιακό πάνελ είναι παρακάτω.  Διάγραμμα καλωδίωσης, πλακέτα, πρόγραμμα επεξεργασίας πλακέτας: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Διάγραμμα καλωδίωσης, πλακέτα, πρόγραμμα επεξεργασίας πλακέτας: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Το κύκλωμα είναι πολύ απλό και εύκολο να επαναληφθεί. Είναι η πιο επιτυχημένη από πολλές αποδεδειγμένες επιλογές. Αλλά ακόμη και ο συγγραφέας της έπρεπε να αλλάξει λίγο. Έπρεπε να αλλάξω τις τιμές των μεταβλητών και σταθερών αντιστάσεων, σχεδιάστηκε ένα κύκλωμα πλακέτας τυπωμένου κυκλώματος.
Αρχικά, ας εκτυπώσουμε την πλακέτα κυκλώματος του ιχνηλάτη σε ειδικό χαρτί. Πρόκειται για τεχνολογία σιδερώματος με λέιζερ. Το χαρτί έχει γυαλιστερή εμφάνιση. Στην πίσω πλευρά, είναι το συνηθισμένο ματ. Πρέπει να εκτυπώσετε σε εκτυπωτή λέιζερ στη γυαλιστερή πλευρά. Μετά την επαφή με το σίδερο, πρέπει να το αφήσετε να κρυώσει και το χαρτί να ξεκολλήσει εύκολα από το στρώμα.

Πριν από τη μεταφορά, ο textolite πρέπει να απολιπανθεί. Είναι καλύτερο να χρησιμοποιείτε λεπτό γυαλόχαρτο. Στερεώνουμε το σχέδιο στον πίνακα και το σιδερώνουμε με ζεστό σίδερο για 2 λεπτά.
Τώρα πρέπει να χαράξετε τον πίνακα παρακολούθησης. Μπορεί να χρησιμοποιηθεί υπερθειικό αμμώνιο. Πωλείται σε καταστήματα ραδιοφώνου. Το ίδιο διάλυμα μπορεί να χρησιμοποιηθεί πολλές φορές. Είναι επιθυμητό να θερμάνετε το υγρό στους 45 βαθμούς πριν από τη χρήση. Αυτό θα επιταχύνει σημαντικά τη διαδικασία χάραξης. Μετά από 20 λεπτά, ο πίνακας ολοκληρώθηκε με επιτυχία. Τώρα πρέπει να αφαιρέσετε το τόνερ. Και πάλι, χρησιμοποιήστε γυαλόχαρτο ή ασετόν.
Τώρα μπορείτε να κάνετε μια τρύπα στον πίνακα. Μπορείτε να ξεκινήσετε τη συγκόλληση εξαρτημάτων.
Η καρδιά του ηλιακού ιχνηλάτη είναι ο λειτουργικός ενισχυτής lm324n. Δύο τρανζίστορ τύπου 41c, τύπου 42c. Ένας κεραμικός πυκνωτής 104. Ο συγγραφέας της ανάπτυξης αντικατέστησε πολλές λεπτομέρειες με τον τύπο smd. Αντί για 5408 διόδους χρησιμοποιήθηκαν τα ανάλογα τους τύπου smd. Το κύριο πράγμα είναι να χρησιμοποιήσετε τουλάχιστον 3 αμπέρ. Μία αντίσταση για 15 kilo-ohms, 1 για 47 kilo-ohms. δύο φωτοαντιστάσεις. 2 αντιστάσεις συντονισμού για 100 και 10 kilo-ohms. Το τελευταίο είναι υπεύθυνο για την ευαισθησία του αισθητήρα φωτογραφίας.
 Ένας ηλιοστάτης, ή αλλιώς, ένας ανιχνευτής, είναι μια συσκευή παρακολούθησης του ήλιου, στην περίπτωσή μας, για την περιστροφή των ηλιακών συλλεκτών έτσι ώστε να είναι πάντα κάθετα στον ήλιο. Δεν είναι μυστικό ότι σε αυτήν την περίπτωση το ηλιακό πάνελ δίνει τη μέγιστη ισχύ. Στο παραπάνω διάγραμμα, η ηλιακή συσκευή παρακολούθησης (ηλιοστάτης) χρησιμοποιεί έλεγχο παλμών και, χωρίς ανθρώπινη βοήθεια, είναι σε θέση να προσανατολίσει την ηλιακή συστοιχία στον καλύτερο φωτισμό.
Ένας ηλιοστάτης, ή αλλιώς, ένας ανιχνευτής, είναι μια συσκευή παρακολούθησης του ήλιου, στην περίπτωσή μας, για την περιστροφή των ηλιακών συλλεκτών έτσι ώστε να είναι πάντα κάθετα στον ήλιο. Δεν είναι μυστικό ότι σε αυτήν την περίπτωση το ηλιακό πάνελ δίνει τη μέγιστη ισχύ. Στο παραπάνω διάγραμμα, η ηλιακή συσκευή παρακολούθησης (ηλιοστάτης) χρησιμοποιεί έλεγχο παλμών και, χωρίς ανθρώπινη βοήθεια, είναι σε θέση να προσανατολίσει την ηλιακή συστοιχία στον καλύτερο φωτισμό.
Το κύκλωμα ηλιοστάτης αποτελείται από μια γεννήτρια ρολογιού (DD1.1, DD1.2), δύο κυκλώματα ολοκλήρωσης (VD1R2C2, VD2R3C3), τον ίδιο αριθμό διαμορφωτών (DD1.3, DD1.4), έναν ψηφιακό συγκριτή (DD2), δύο μετατροπείς (DD1. 5, DD1.6) και διακόπτη τρανζίστορ (VT1-VT6) για τη φορά περιστροφής του ηλεκτροκινητήρα M1, ο οποίος ελέγχει την περιστροφή της πλατφόρμας στην οποία είναι εγκατεστημένη η ηλιακή μπαταρία. Με την ενεργοποίηση, η γεννήτρια στα στοιχεία DD1.1, DD1.2 παράγει παλμούς ρολογιού που ακολουθούν σε συχνότητα περίπου 300 Hz. Όταν η συσκευή βρίσκεται σε λειτουργία, συγκρίνονται οι διάρκειες των παλμών που δημιουργούνται από τους μετατροπείς DD1.3, DD1.4 και τα κυκλώματα ολοκλήρωσης VD1R2C2, VD2R3C3. Η κλίση τους ποικίλλει ανάλογα με τη σταθερά χρόνου ολοκλήρωσης, η οποία, με τη σειρά της, εξαρτάται από τον φωτισμό των φωτοδιόδων VD1 και VD2 (το ρεύμα φόρτισης των πυκνωτών C2 και C3 είναι ανάλογο με τον φωτισμό τους). Τα σήματα από τις εξόδους των κυκλωμάτων ολοκλήρωσης τροφοδοτούνται στους διαμορφωτές στάθμης DD1.3, DD1.4 και στη συνέχεια σε έναν ψηφιακό συγκριτή που κατασκευάζεται στα στοιχεία του μικροκυκλώματος DD2. Ανάλογα με την αναλογία της διάρκειας των παλμών εισόδου προς τον συγκριτή, εμφανίζεται ένα σήμα χαμηλής στάθμης στην έξοδο του στοιχείου DD2.3 (pin 11) ή DD2.4 (pin 4). Με τον ίδιο φωτισμό των φωτοδιόδων, σήματα υψηλού επιπέδου υπάρχουν και στις δύο εξόδους του συγκριτή. Οι μετατροπείς DD1.5 και DD1.6 απαιτούνται για τον έλεγχο των τρανζίστορ VT1 και VT2. Ένα υψηλό επίπεδο σήματος στην έξοδο του πρώτου μετατροπέα ανοίγει το τρανζίστορ VT1, στην έξοδο του δεύτερου - VT2. Τα φορτία αυτών των τρανζίστορ είναι κλειδιά σε ισχυρά τρανζίστορ VT3, VT6 και VT4, VT5, τα οποία αλλάζουν την τάση τροφοδοσίας του ηλεκτροκινητήρα M1. Τα κυκλώματα R4C4R6 και R5C5R7 εξομαλύνουν τους κυματισμούς στις βάσεις των τρανζίστορ ελέγχου VT1 HVT2. Η φορά περιστροφής του κινητήρα αλλάζει ανάλογα με την πολικότητα της σύνδεσης με την πηγή ισχύος. Ο ψηφιακός συγκριτής δεν επιτρέπει σε όλα τα βασικά τρανζίστορ να ανοίγουν ταυτόχρονα, και έτσι εξασφαλίζει υψηλή αξιοπιστία του συστήματος.
Το πρωί με την ανατολή του ηλίου, ο φωτισμός των φωτοδιόδων VD1 και VD2 θα είναι διαφορετικός και ο ηλεκτροκινητήρας θα αρχίσει να στρέφει το ηλιακό πάνελ από τα δυτικά προς τα ανατολικά. Καθώς η διαφορά στη διάρκεια των παλμών των διαμορφωτών μειώνεται, η διάρκεια του προκύπτοντος παλμού θα μειωθεί και η ταχύτητα περιστροφής της ηλιακής μπαταρίας θα επιβραδυνθεί σταδιακά, γεγονός που θα εξασφαλίσει την ακριβή τοποθέτησή της στον ήλιο. Έτσι, με τον έλεγχο παλμών, η περιστροφή του άξονα του κινητήρα μπορεί να μεταδοθεί απευθείας στην πλατφόρμα με ηλιακή μπαταρία, χωρίς τη χρήση κιβωτίου ταχυτήτων. Κατά τη διάρκεια της ημέρας, η πλατφόρμα του ηλιακού πάνελ θα περιστρέφεται με την κίνηση του ήλιου. Με την έναρξη του λυκόφωτος, η διάρκεια των παλμών στην είσοδο του ψηφιακού συγκριτή θα είναι η ίδια και το σύστημα θα μεταβεί σε κατάσταση αναμονής. Σε αυτή την κατάσταση, το ρεύμα που καταναλώνεται από τη συσκευή δεν υπερβαίνει τα 1,2 mA (στη λειτουργία προσανατολισμού, εξαρτάται από την ισχύ του κινητήρα).
Εάν ο σχεδιασμός συμπληρώνεται με ένα μπλοκ κατακόρυφης εκτροπής συναρμολογημένο σύμφωνα με ένα παρόμοιο σχήμα, είναι δυνατός ο πλήρης αυτοματισμός του προσανατολισμού της μπαταρίας και στα δύο επίπεδα. Εάν ξαφνικά δεν υπήρχαν μικροκυκλώματα που υποδεικνύονται στο διάγραμμα, μπορούν να αντικατασταθούν με μικροκυκλώματα της σειράς K564, K176 (με τάση τροφοδοσίας 5 ... 12 V). Τα τρανζίστορ KT315A είναι εναλλάξιμα με οποιαδήποτε από τις σειρές KT201, KT315, KT342, KT3102 και KT814A - με οποιαδήποτε από τις σειρές KT814, KT816, KT818, καθώς και με γερμάνιο P213-P215, P217. Στην τελευταία περίπτωση, αντιστάσεις με αντίσταση 1 ... 10 kOhm θα πρέπει να συνδέονται μεταξύ των εκπομπών και των βάσεων των τρανζίστορ VT3-VT6 για να αποφευχθεί το τυχαίο άνοιγμα τους λόγω σημαντικού αντίστροφου ρεύματος. Αντί για τις φωτοδιόδους FD256, μπορείτε να βάλετε κομμάτια από ηλιακά κύτταρα (συνδεδεμένα με πολικότητα), φωτοτρανζίστορ χωρίς κυκλώματα πόλωσης, καθώς και φωτοαντιστάσεις, για παράδειγμα, SF2, SFZ ή FSK οποιασδήποτε τροποποίησης. Είναι απαραίτητο μόνο να επιλέξετε (με αλλαγή της αντίστασης της αντίστασης R1) τη συχνότητα της γεννήτριας ρολογιού σύμφωνα με την αξιόπιστη λειτουργία του ψηφιακού συγκριτή. Ένα φίλτρο πράσινου φωτός χρησιμοποιείται για την προστασία των φωτοδιόδων από την υπερβολική ακτινοβολία. Μια αδιαφανής κουρτίνα τοποθετείται ανάμεσα στους αισθητήρες φωτογραφίας. Είναι στερεωμένο κάθετα στον πίνακα με τέτοιο τρόπο ώστε όταν αλλάζει η γωνία φωτισμού, να κρύβει μια από τις φωτοδίοδοι. 










