Muy a menudo, los paneles solares se instalan de forma rígida y permanente. Esto es simple, pero no muy eficiente, ya que durante el día el sol se mueve por el cielo y la cantidad de energía luminosa que reciben los paneles solares cambia. El retorno máximo de la batería solar es posible solo cuando la luz cae sobre el panel perpendicular a su plano. Para que los rayos del sol caigan sobre el panel solar siempre de forma perpendicular. Se utilizan sistemas de seguimiento solar de diferentes diseños y diferentes niveles de complejidad. Aunque dicho sistema complica la instalación de paneles solares, le permite aprovecharlos al máximo. Los paneles solares aún no son baratos, y nosotros, al invertir en ellos, ciertamente queremos aprovechar todo su potencial.
A menudo, los sistemas de seguimiento más simples solo pueden girar el panel en un eje. Dichos dispositivos incluyen un par de fotosensores y un par de comparadores que controlan un motor eléctrico incluido en la diagonal del puente H más simple. Dichos dispositivos, por supuesto, también aumentan la eficiencia de los paneles solares, pero no lo hacen de manera muy eficiente, ya que solo funcionan dentro de un eje. Este artículo describe un sistema de seguimiento solar muy simple que, sin embargo, puede mover el panel en dos ejes, lo que aumenta la eficiencia de la matriz solar. Durante el funcionamiento, el sistema intenta continuamente posicionar el panel para que su plano sea siempre perpendicular a la luz solar incidente y obtener el máximo retorno de electricidad de la batería. El dispositivo de seguimiento sigue al sol desde el amanecer hasta los últimos rayos del atardecer y reanuda automáticamente su trabajo a la mañana siguiente.
Diagrama del dispositivo contiene el chip LM339, que son cuatro comparadores analógicos en un paquete común. Dos motores están controlados por un microcircuito L293D especializado: un puente H doble. Además de los microcircuitos, el diagrama del circuito contiene varios elementos discretos. Los fotorresistores LDR1 - LDR4 se utilizan como sensores de intensidad de luz Estos fotorresistores determinan la posición del panel solar en relación con los rayos del sol.
El bloque de fotorresistencia junto con el comparador LM339 genera señales de control para el controlador de motor L293D. Los fotorresistores LDR1 y LDR2 se fijan en las esquinas del panel solar en el eje X, en LDR3 y LDR4, en el eje Y. niveles de bajo voltaje.
Considere el algoritmo de trabajo sistema en el ejemplo de su parte responsable de moverse a lo largo del eje X. Si el fotorresistor LDR2 recibe más luz que LDR1, entonces la resistencia de LDR2 se vuelve menor que la resistencia de LDR1. Aparece un nivel de voltaje más alto en las entradas de los comparadores A1 y A2 (4, 7). En este caso, aparece un nivel de alto voltaje en la salida del comparador A2 (1). El motor M1 comienza a girar en una de las direcciones (digamos, en sentido contrario a las agujas del reloj), girando el panel solar.
Si LDR1 recibe más luz que LDR2, entonces su resistencia se vuelve menor que la resistencia de LDR2, lo que reduce el voltaje en las entradas del comparador (4, 7). En la salida (2) del comparador A2, aparece un nivel alto y el motor comienza a girar en sentido contrario (digamos, en el sentido de las agujas del reloj). El seguimiento a lo largo del eje Y funciona exactamente de la misma manera.
La siguiente figura muestra un posible diseño de un sistema de seguimiento solar. El circuito se puede ensamblar en una placa de pruebas unificada o se puede enrutar una placa de circuito impreso convencional.
Después del uso de paneles solares para la producción de electricidad a escala industrial, los ingenieros y diseñadores comenzaron a buscar formas de aumentar la eficiencia de dichas centrales eléctricas. La dispersión total de la luz solar, que está determinada por el cambio de dirección de la caída de los rayos solares sobre las fotocélulas, no permitía el uso eficiente de los paneles solares durante las horas de luz. Rápidamente se encontró una salida a esta situación: se comenzaron a instalar paneles solares en una base móvil conectada a un sistema de seguimiento solar.
Como sabes, para obtener la máxima potencia de los paneles solares, es necesario que los rayos del sol incidan en el plano de las baterías de forma perpendicular. Con esta dirección de los rayos, la eficiencia de los paneles solares puede alcanzar el 50-55%. Para baterías instaladas permanentemente, esta cifra puede reducirse a 10-15% debido a cambios en el ángulo de incidencia de la luz solar.
El dispositivo de seguimiento solar consta de dos partes principales:
1. El esquema de control, que determina la posición del Sol. El diagrama más simple de un dispositivo de seguimiento solar o de otro modo un seguidor (Solar Tracker) se muestra a continuación. Para determinar la posición del Sol se utilizan dos fotorresistores. El esquema incluye:
- Chip amplificador operacional LM1458 (K140UD20);
- transistores BD139 (KT815G, KT961A) y BD140 (KT814G, KT626V);
- fotoresistores;
- diodos 1N4004 (KD243G);
- resistencias y resistencias de sintonización.

2. Mecanismos de giro e inclinación de las baterías en función de la dirección de los rayos solares. El mecanismo de inclinación permite el uso de dichos sistemas de seguimiento en cualquier latitud geográfica: al instalar paneles solares en un área que corresponde a 320 de latitud norte, el eje del dispositivo debe girarse 320 en relación con el horizonte. Los accionamientos de todos los mecanismos del sistema de seguimiento se construyen sobre la base de motores eléctricos, que se ven afectados por el sistema de control. Los motores eléctricos y el sistema de control son alimentados por los propios paneles solares, por lo que este tipo de instalaciones son autónomas.
Como ves, el esquema y dispositivo del seguidor solar es bastante sencillo. Naturalmente, los sistemas más complejos se utilizan a escala industrial, pero un esquema similar se puede ensamblar de forma independiente para una instalación doméstica para la producción de electricidad a partir de paneles solares.

La red contiene una gran cantidad de esquemas y soluciones listas para usar para sistemas de seguimiento solar. Entonces, si es necesario mejorar el diseño de los paneles solares y aumentar su rendimiento, siempre existe la oportunidad de hacerlo usted mismo.
Un seguidor solar es un sistema electrónico-mecánico diseñado para apuntar paneles solares hacia el Sol. El sistema rastrea la posición del Sol en el cielo y controla un servo que gira los paneles en la dirección adecuada. El uso de un rastreador de este tipo le permite obtener el máximo rendimiento de los paneles solares.
La mayoría de los rastreadores caseros que se encuentran en Internet se ensamblan en Arduino, los fotosensores se utilizan para determinar la posición del Sol. Según el grado de iluminación y la posición relativa de los fotosensores, se realiza un giro en la dirección de máxima iluminación. Este método tiene desventajas: no se sabe cómo se comportará el sistema en tiempo nublado; baja inmunidad al ruido en términos de respuesta a la luz de la luna y fuentes de luz brillante, así como a nubes individuales.
Debido a las desventajas anteriores, desarrollé mi propia versión de un seguidor solar económico servoaccionado que proporciona un seguimiento del Sol en todo el cielo visible en cualquier momento, independientemente de la ubicación geográfica.
La posición del Sol en el cielo se puede determinar no solo por la iluminación de los fotosensores, sino también por las fórmulas de la mecánica celeste basadas en las coordenadas geográficas del punto de observación y la hora exacta. Ahora habrá muchas definiciones y fórmulas relacionadas con la mecánica celeste, así que prepárate para forzar tus circunvoluciones). Para apuntar los paneles solares, debe determinar las coordenadas horizontales del Sol, esta es la altura y el acimut. El centro de este sistema de coordenadas coincide con la ubicación del observador, los cálculos se realizan en relación con el plano del horizonte matemático.
La altura h es el ángulo entre el plano de la estera. horizonte y dirección a la luminaria, contados desde 0⁰ hasta +90⁰ hasta el cenit, y desde 0⁰ hasta -90⁰ hasta el nadir.
Acimut A: el ángulo entre la línea del mediodía (en términos generales, la dirección hacia el sur) y la línea de intersección del plano del tapete. horizonte con el plano del círculo vertical de la luminaria. Se cuenta desde el punto sur en la dirección de la rotación diaria de la esfera celeste dentro de 0⁰ ... 360⁰, o desde 0⁰ hasta +180⁰ hacia el oeste y desde 0⁰ hasta −180⁰ hacia el este. Las coordenadas horizontales de la estrella cambian constantemente, debido a la rotación diaria de la Tierra.
A continuación se muestran las fórmulas para calcular la altura y el azimut de la luminaria:
h = asen (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ costo);
A = atan2 (cos
donde δ es la declinación de la estrella, t es el ángulo horario de la estrella, ϕ es la latitud del punto de observación (0⁰…+90⁰ para el hemisferio norte, 0⁰…-90⁰ para el sur, 0⁰ es el ecuador).
Descifrado de la función atan2(y, x): 
Como puedes ver, para calcular las coordenadas horizontales, es necesario calcular la declinación y el ángulo horario de la estrella. Estas coordenadas se refieren al primer sistema de coordenadas ecuatoriales, donde el plano principal es el plano del ecuador celeste.
Declinación δ - el ángulo entre el plano del ecuador celeste y la dirección a la luminaria, se mide de 0⁰ a +90⁰ hacia el polo norte, y de 0⁰ a -90⁰ hacia el polo sur.
El ángulo horario t es el ángulo diedro entre el plano del meridiano celeste y el círculo de declinación de la luminaria. Se cuenta en el sentido de la rotación diaria de la esfera celeste, al oeste del punto superior del ecuador celeste, dentro de 0⁰ ... 360⁰, o de 00:00 a 24:00 (cada hora). Además, el ángulo horario se puede medir de 0⁰ a 180⁰ (de 00:00 a 12:00) hacia el oeste y de 0⁰ a −180⁰ (de 00:00 a -12:00) hacia el este. El ángulo horario es igual a 0 en el momento de la culminación superior de la estrella, para el Sol en el mediodía verdadero (no siempre la misma hora cuando el reloj marca las 12:00 hora local).
La declinación del Sol cambia a lo largo del año (desigualmente) de -23,43⁰ a +23,43⁰, debido al movimiento orbital de la Tierra alrededor del Sol, y no está relacionada con la rotación diaria de la Tierra. Para determinar la declinación del Sol para cualquier día del año, la forma más sencilla es a partir de la tabla de valores medios de declinación para un ciclo de 4 años. La tabla se puede descargar al final del artículo.
El ángulo horario de la estrella cambia durante el día (debido a la rotación diaria de la Tierra), se puede calcular, conociendo la verdadera hora solar:
t \u003d Ts.ist - 12:00 h, (-12:00 ... + 11:59),
donde Ts.ist es la hora solar verdadera (00:00…23:59h).
La hora solar verdadera se puede calcular conociendo la hora local, la zona horaria y la longitud del punto de observación:
Ts.ist = Ts.av + EOT, o Ts.ist = UTC + λ + EOT,
donde Ts.av es el tiempo solar medio en algún punto de la Tierra (depende de la longitud del punto), UTC es el tiempo universal coordinado, λ es la longitud del punto de observación en unidades horarias, EOT es la ecuación del tiempo.
El tiempo universal coordinado se puede calcular a partir de la hora local (Tm) y la zona horaria (N): UTC = Tm – N. La longitud de ubicación λ se mide desde 0⁰ a 180⁰ al este del meridiano principal (longitud este) y desde 0⁰ a -180⁰ al oeste (longitud oeste). Al sustituir en la fórmula anterior, la longitud debe convertirse a unidades de hora (1⁰ = 4 min).
La ecuación del tiempo EOT muestra la diferencia entre el tiempo solar medio y el tiempo solar verdadero, ya que el movimiento diario del Sol es desigual debido a la elipticidad de la órbita de la Tierra, así como a la inclinación del eje de la Tierra respecto al plano de la eclíptica:
EOT = 9,87 ∙ sen2B - 7,53 ∙ cosB - 1,5 ∙ senB,
donde B = (360⁰ (N-81))/365, N es el número ordinal del día del año.
Así, durante el año, el valor de la ecuación del tiempo cambia de -14,3 minutos a +16,4 minutos.
A continuación se muestra un gráfico de cómo cambia la ecuación del tiempo en el transcurso de un año: 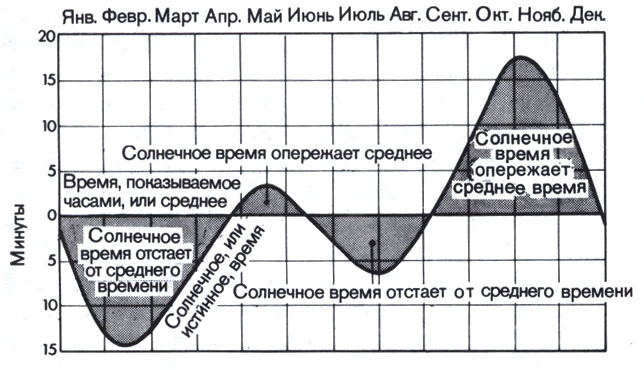
Tuve que llevar todos estos cálculos al programa del microcontrolador, no me atrevía a escribir en ensamblador, así que comencé a estudiar SI, tuve que jugar con fórmulas y cálculos durante semanas para obtener el resultado correcto, estudiando SI en el camino. Como resultado, logré escribir un programa de trabajo, mientras que el error de cálculo no supera el ±1⁰.
El seguidor solar fue concebido para una pequeña batería solar con una potencia de 2W y un voltaje de 6V para cargar una batería de iones de litio, pero es mejor utilizar una batería más potente de al menos 4W. Como accionamientos eléctricos, utilicé servos MG996R (se pueden comprar en China, el enlace se encuentra al final del artículo). Además, compré soportes especiales para montar una instalación de altacimutal (enlace para hacer pedidos al final del artículo). El diseño ensamblado le permite orientar la batería solar en altura y azimut, mientras que el servo de azimut está estacionario y gira el servo de altura junto con los soportes.
A continuación se muestra un diagrama del seguidor solar: ![]()
El circuito se basa en el microcontrolador PIC16F876A, que tiene una cantidad significativa de memoria y contiene muchos módulos periféricos. Toda la estructura está alimentada por una batería de iones de litio, que en consecuencia se carga desde una batería solar a través de un módulo basado en el chip TP4056, este es un controlador de carga especializado para baterías de iones de litio (enlace de pedido al final del artículo) . Para determinar la hora y la fecha actuales, el esquema utiliza un módulo (enlace para realizar pedidos al final del artículo). El reloj es bastante preciso, la desviación del tiempo es de ± 2 minutos por año, ya escribí un artículo detallado sobre ellos, aquellos que lo deseen pueden familiarizarse. Para mostrar los parámetros, se utiliza un indicador digital en (enlace para pedidos al final del artículo).
El voltaje máximo de la batería de iones de litio no supera los 4,1 V, lo que no es suficiente para alimentar los servos, por lo que se ha agregado al circuito un módulo elevador basado en el chip MT3608 (enlace de pedido al final del artículo ). El voltaje de entrada mínimo del módulo es de 2 V, la corriente de carga máxima es de 2 A, el módulo tiene una resistencia variable de varias vueltas para ajustar el voltaje de salida. Para ahorrar energía, la potencia de los servos no se suministra constantemente, sino solo para cambiar la posición del eje. La potencia se conmuta mediante un transistor de efecto de campo de canal p VT1, el módulo convertidor también se controla desde el microcontrolador.
La placa del módulo no proporciona un contacto para el control, por lo que es necesario soldar adicionalmente el cable al 4. ° pin del chip MT3608, esta es la entrada de encendido / apagado del convertidor. En la placa, este pin está conectado a la fuente de alimentación "+", primero debe cortar las pistas adecuadas para este pin (para esto, deberá desoldar el microcircuito) o levantar el pin sobre el tablero. Se instala un chip de resistencia divisora de voltaje en la placa del módulo, aumentando la resistencia de esta resistencia también reducirá el consumo en modo de suspensión, lo reemplacé por otro, con una resistencia de 9.1 kOhm, inicialmente era de 2.2 kOhm. Después del reemplazo, debe configurar el voltaje de salida en aproximadamente 5-5.5V para alimentar los servos, la figura a continuación: 
El módulo del reloj también debe mejorarse, para reducir el consumo de energía, debe soldar el chip de memoria 24c32, el LED "POWER", así como la resistencia (200 Ohm), a través de la cual se suministra el voltaje de suministro externo a la batería , por qué los chinos hicieron esto sigue siendo incomprensible, porque la batería no está diseñada para cargarse, vea la imagen a continuación: 
El LED HL1 está configurado para indicar un error de comunicación con el reloj DS3231 (a través de la interfaz I2C), el LED comienza a parpadear si no hay respuesta del reloj.
El montaje de la configuración de alt-azimut debe comenzar cuando los servos se colocan en la posición media, esto sucede cuando el dispositivo se enciende por primera vez, el indicador mostrará la inscripción "Cent". Es conveniente montar el servo azimutal sobre una placa que servirá de base de la instalación, o sobre un soporte, de forma que el eje de salida quede dirigido verticalmente hacia arriba. A continuación, debe colocar el soporte del servo de altura, primero debe atornillar el manguito deslizante al soporte y luego el manguito adaptador. El soporte debe colocarse perpendicular al lado largo del servo azimutal, como se muestra en la foto: 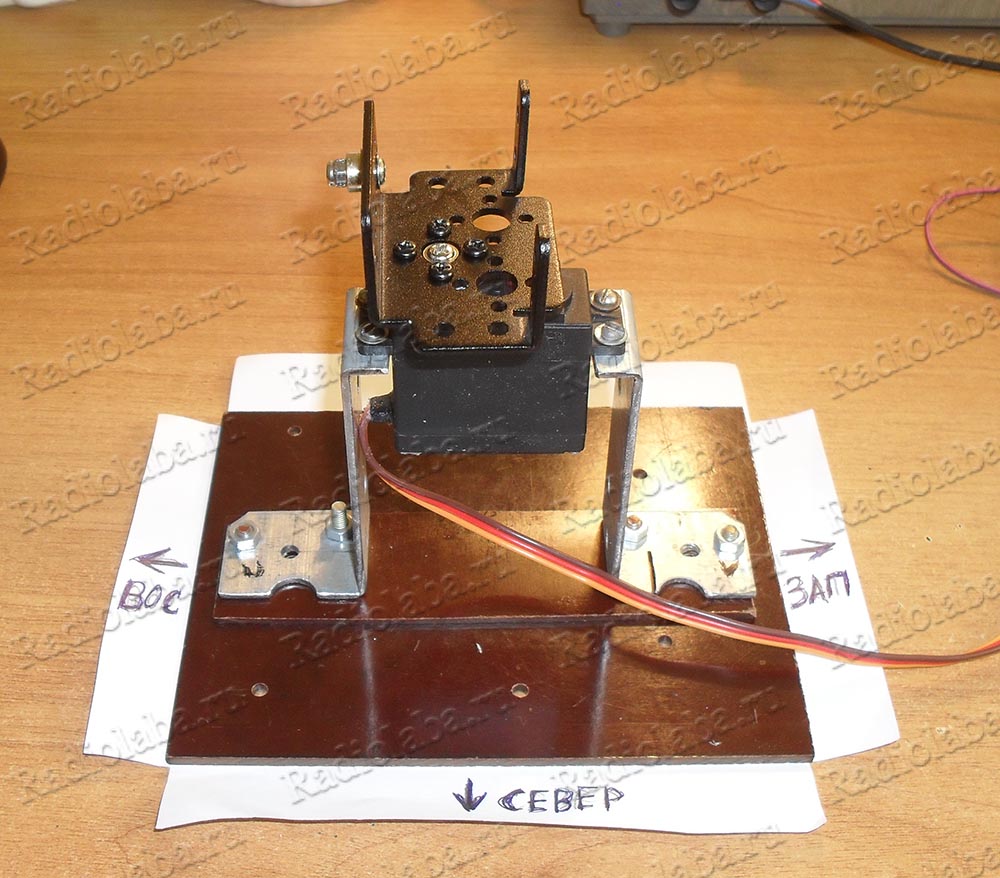
Al ensamblar, es difícil lograr una posición perpendicular, pero esto no es necesario, las desviaciones dentro de ± 5-10 grados son aceptables. En el futuro, el ajuste del software eliminará esta desviación.
Después de fijar el servo de altura, queda por sujetar el soporte del portador, primero pruebe el manguito adaptador en el eje del servo, seleccione una posición para que el soporte del portador después de la instalación se dirija verticalmente hacia arriba. Nuevamente, no es necesario establecer la posición exacta, como dije anteriormente. Una vista general de la instalación se muestra en la siguiente foto: 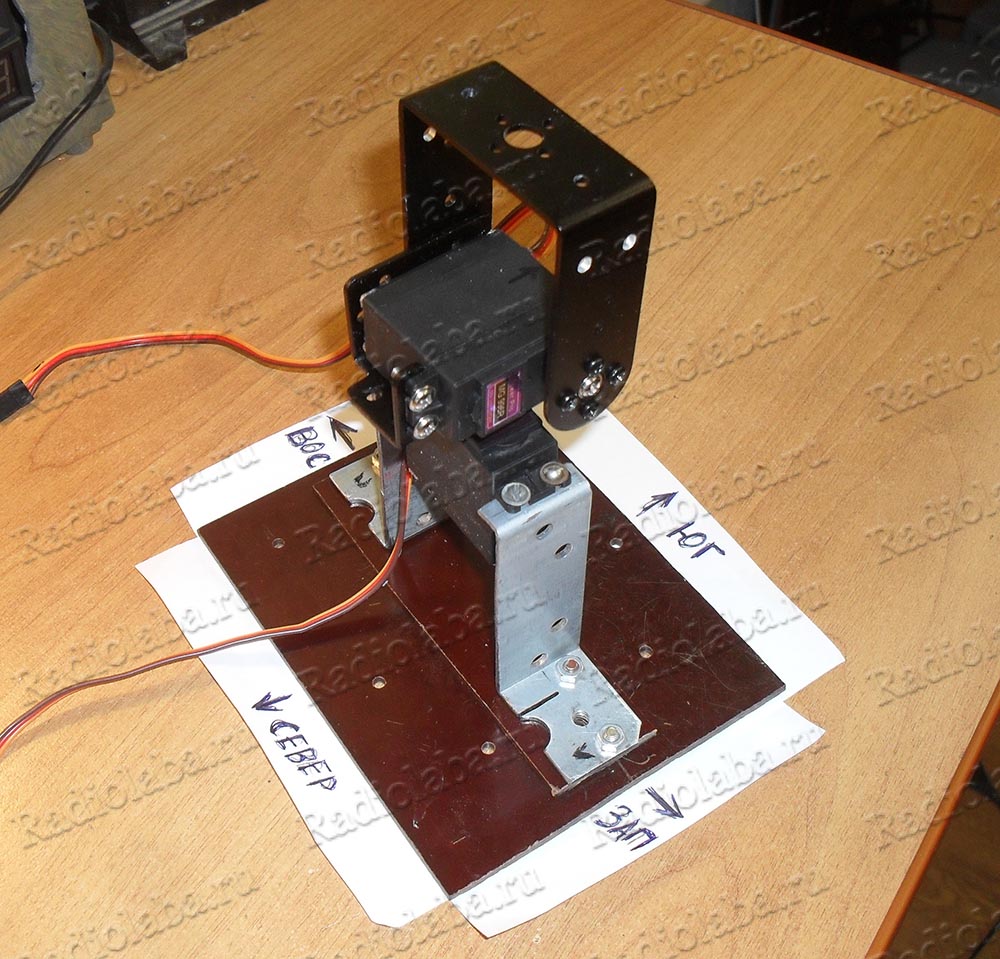
El siguiente es el procedimiento para ajustar las posiciones extremas de los servos. El ajuste debe realizarse sobre una superficie plana, cuando el eje del servo esté en posición azimutal vertical (el eje de rotación se dirige a lo largo de una plomada). Después de presionar el botón "Enter", el soporte de soporte gira hacia el norte condicional y toma una posición horizontal (la inscripción "norte" se muestra en el indicador): 
Si hay una desviación de la horizontal, debe ajustar la posición del soporte con los botones "Establecer" y "Descargar". Así, se ajusta la posición extrema del servo. Además, cuando se presiona el botón "Entrar", el corchete gira hacia el Sur condicional (el Sur está escrito en el indicador). Si es necesario, ajuste la posición horizontal del soporte como se describe arriba.
Presionando más el botón "Enter" girará el brazo hacia el este convencional (en el indicador hay una inscripción EASt). Los botones “Set” y “Discharge” corrigen la dirección, si bien es conveniente enfocarse en el cuerpo del servoconvertidor azimutal, es necesario que el soporte esté dirigido a lo largo del lado largo del cuerpo, visto desde arriba: 
La próxima vez que presione el botón "Enter", el soporte girará hacia el oeste (el indicador muestra la inscripción WEST), el ajuste se realiza como se describe anteriormente.
Como resultado de la corrección, el soporte gira en altura y azimut dentro de 180⁰, los valores de corrección se almacenan en la memoria EEPROM del microcontrolador. Después de presionar el botón "Entrar", el soporte tomará la dirección corregida hacia el Sur condicional. Para la correcta orientación de la batería solar, la dirección al Sur condicional debe indicar el punto real del Sur en el área dada, y el eje del servomotor en azimut se ubica verticalmente a lo largo de una plomada.
Después de presionar el botón "Entrar" nuevamente, se deben configurar la hora, la fecha, la zona horaria, las coordenadas de ubicación y la duración del modo de suspensión. En consecuencia, para cada parámetro, se muestran las siguientes inscripciones en el indicador:
– hora local, por defecto 0 h 0 min;
– longitud de ubicación, por defecto -0 grados. 0 minutos (para longitud oeste, se pone un signo menos “-”);
– latitud de ubicación, por defecto -0 grados. 0 minutos (para la latitud sur, se pone un signo menos "-");
– zona horaria, por defecto -0, (para longitud oeste se pone un signo menos “-”);
– duración del modo de suspensión, por defecto 1 min.
Los botones "Descargar" y "Establecer" establecen los valores de los parámetros, cuando se presiona el botón "Entrar" se escriben los valores de hora y fecha, el resto de los parámetros se almacenan en la memoria EEPROM del microcontrolador. Después de ingresar todos los parámetros, el indicador muestra la inscripción SUCCES (durante 1 segundo, luego el indicador se apaga), luego la instalación apunta al Sol, de acuerdo con los parámetros ingresados.
Para ahorrar energía, apuntar al Sol se realiza después de un cierto período de tiempo, que se establece en el parámetro de duración del modo de suspensión. Después de apuntar, los servos se desactivan, el microcontrolador entra en modo de suspensión, el consumo total del rastreador se reduce a 160 μA. La duración del "dormir" se puede establecer entre 1 y 255 minutos.
Cuando el rastreador se enciende nuevamente (después de apagar la alimentación), primero se verifica la memoria EEPROM, si los parámetros guardados son correctos, el rastreador continúa rastreando el Sol, mientras que el indicador digital permanece en modo de suspensión y no enciende para ahorra energía. Por lo general, puede apagar el indicador después de la entrada inicial de parámetros. Para volver a ingresar al modo de corrección, debe mantener presionado el botón "Configurar" y encender el rastreador. Si los parámetros leídos de la EEPROM son incorrectos o faltan, también ingresará al modo de corrección.
Además, agregué la función de enviar los parámetros principales a través de la interfaz UART al programa del microcontrolador. Después de calcular la posición del Sol, el microcontrolador transmite el valor actual de la hora, la fecha, el número de serie del día, las coordenadas de ubicación ingresadas durante la configuración, así como los valores actuales de la altura y el acimut del Sol. Cada parámetro comienza con el símbolo “$” y termina con los símbolos “\r”, “\n”. Estos datos se pueden ver en una computadora conectando el rastreador a través de un adaptador USB-UART. En la configuración del programa del terminal, debe configurar los siguientes ajustes: velocidad de transmisión de 9600 bps, 8 bits de datos, un bit de parada. A continuación se muestra una captura de pantalla del programa terminal: ![]()
Los servos MG996R no están protegidos de la humedad dentro de la caja, por lo que en caso de uso en exteriores, los servos deben estar sellados. Retire los cuatro pernos de la parte inferior de la caja y aplique sellador de silicona neutral entre las juntas de la caja y aplique sellador alrededor del manguito para introducir los cables en la caja. También puede aplicar grasa a los engranajes de la caja de cambios, ya que el de fábrica está prácticamente ausente. Según las revisiones, la grasa SHRUS-4 es la más adecuada, a diferencia del litol, no se congela con el frío. Para sellar el orificio superior, se puede colocar un anillo de silicona en el eje de salida y se debe quitar el chaflán del adaptador, que se instala en el eje, para no crear una fricción excesiva.
Adjunté una placa de textolita rectangular al soporte de soporte, sobre el cual pegué la batería solar con cinta de doble cara. Dado que los servos están desenergizados la mayor parte del tiempo, es posible girar el eje en altura bajo la influencia de la gravedad del panel solar. Para evitar esto, coloqué contrapesos largos hechos de ángulos y placas a los lados del soporte del transportador. Al cambiar la masa de los contrapesos, equilibré la estructura a lo largo del eje de rotación de la altura.
El seguidor realiza el guiado cuando el Sol está por encima del horizonte, es decir, cuando su altura es superior a 0⁰. Cuando el Sol se pone por debajo del horizonte (valor de altitud negativo), el rastreador dirige la matriz solar hacia el este y se reanuda el seguimiento al amanecer. El seguimiento se realiza sobre toda la región visible del cielo.
El movimiento diario del Sol y las estrellas se puede ver en una computadora en el programa Stellarium, un planetario virtual gratuito que muestra un cielo estrellado realista. El programa muestra el movimiento de las luminarias en el cielo, puede ver la posición del Sol y las estrellas en cualquier momento, también hay datos disponibles en varias coordenadas.
Monté el dispositivo en una placa de circuito impreso que diseñé para encajar en la carcasa GAINTA G1202G. El tablero tiene un lugar para un puente (puente), con el que puede apagar el indicador digital.
El transistor de efecto de campo VT1 se puede reemplazar con IRLML2244, IRLML6402. También puede usar transistores en el paquete SOIC-8 (tendrá que rehacer la placa): IRF9332, IRF9310, IRF9317.
A temperaturas negativas, las baterías de Li-ion pierden una capacidad importante (el electrolito se congela), no se recomienda utilizar baterías a temperaturas inferiores a +5 ⁰C, ya que esto conduce a una reducción prematura del recurso. Por lo tanto, si planea operar el rastreador en un clima helado, es mejor usar una batería de fosfato de hierro y litio LiFePO4. Las baterías de este tipo son más resistentes a las heladas, el rango de temperatura de funcionamiento es de -30 ⁰C a +55 ⁰C, el voltaje máximo es de 3,65 V, el mínimo es de 2 V, el promedio es de 3,3 V, es decir, inferior al de Li -ion. Además, las ventajas incluyen un voltaje de descarga estable cercano a 3.2V. Al final del artículo hay enlaces para pedir una batería, así como un módulo para cargar.
A partir de un seguidor solar se puede crear un pequeño sistema autónomo que no requiera alimentación externa, como una estación meteorológica remota, o un sistema de seguridad para una casa de verano, etc. Puede reemplazar los servos por otros más potentes e instalar un panel solar más grande. Es posible adaptar el circuito para placas solares a 12, 18V, para cargar varias baterías conectadas en serie, pero para ello tendrás que cambiar el circuito y utilizar otros módulos de carga.
A continuación se muestran enlaces para el pedido de módulos y componentes para el montaje de un seguidor solar:
Batería solar 6V 4.5W
Módulo de reloj en tiempo real DS3231
Indicador digital en el controlador MAX7219
Módulo de carga de batería de iones de litio en TP4056
Batería LiFePO4 6500mah
Batería LiFePO4 1800mah
Módulo de carga de batería LiFePO4
ServoMG996R
Soportes para montaje de instalación alt-azimutal para servos MG996R
Convertidor elevador en MT3608
![]()
![]()
![]()
![]()
![]()
![]()
Para empezar, probablemente valga la pena decir qué se entiende por seguidor solar en este artículo. En definitiva, el dispositivo es un soporte móvil para un panel solar, necesario para que en nuestras latitudes templadas el panel recoja la cantidad de luz suficiente, cambiando su posición siguiendo al sol.
En este caso, el prototipo de seguidor solar se montó sobre la base de Arduino. Para rotar la plataforma en los ejes horizontal y vertical, se utilizan servoaccionamientos, cuyo ángulo de rotación depende de la potencia de la luz que incide sobre los fotorresistores. El constructor de metal soviético favorito de todos se utiliza como cuerpo.
Sería útil mencionar que todo esto se hizo como un proyecto de curso, por lo que no me molesté en comprar y montar el panel solar en sí y la batería, ya que su presencia no está relacionada con el trabajo del rastreador. Como excusa, puedo decir que las posibilidades del constructor de metal soviético son inmensas, por lo que atornillarle un pequeño panel solar para cargar el teléfono no será difícil si surge tal deseo.
Entonces, lo que se usó en la asamblea:
Se pidió al orador, que apareció de repente en la lista, que realzara el efecto de alta tecnología. El caso es que los servos solo pueden girar 180 grados, y no necesitamos más, dado que estamos siguiendo al sol. Pero al probar el proyecto, cuando realmente no puedes seguir el sol durante dos minutos de la demostración, resultó que sería bueno señalar en qué punto vale la pena dejar de agitar la linterna, porque el servo ha llegado a la muerte. zona. Para ello, se añadió la convocatoria anterior.
Entonces, comencemos a recopilar el rastreador. Para empezar, dividamos el próximo frente de trabajo en cuatro etapas condicionales: ensamblar el soporte para paneles solares y montar servos, unir elementos sensibles a la luz a la estructura ensamblada, soldar y escribir código para Arduino.
Las fotorresistencias están unidas al cuerpo de manera bastante segura, lo único con lo que valdría la pena trabajar es la precisión de su ubicación en la plataforma: ahora no se ven lo suficientemente perpendiculares, lo que puede molestar a los perfeccionistas y estropear un poco la precisión de la rotación.
Un poco de circuitería: la conexión de los elementos fotosensibles se realiza según el circuito divisor de tensión, para lo cual se requerían las resistencias de salida indicadas en la lista de elementos. Todos los fotorresistores están soldados a un pin común conectado a la salida de potencia de cinco voltios del Arduino. Por conveniencia y estética, las patas de los fotorresistores están soldadas a los contactos de dos cables aislados de tres núcleos (un contacto permaneció sin usar y oculto). Todos los detalles del circuito se pueden ver en el siguiente diagrama.




El código
#incluir

El canal “bang-bang” mostró cómo hacer un seguidor solar casero para paneles. Rotarán automáticamente después del sol, aumentando la eficiencia de la planta de energía.
Necesitará dos paneles solares con una capacidad de 3,5 vatios cada uno. A la salida, uno tiene más de 6 voltios, que cuando se conectan dos baterías en serie, darán más de 12 voltios. Toma USB en la parte trasera. Tres salidas de tres segmentos de batería. Cada uno de los cuales genera 2 voltios. Es decir, si es necesario, puede conectarse en consecuencia y obtener 2, 4, 6 voltios.

El siguiente nodo importante son dos servos. Uno rotará la matriz solar horizontalmente y el otro verticalmente. Estos accionamientos no son simples, no son tan fáciles de hacer girar. Se necesita alguna mejora. En el conjunto con cada uno de los motores hay cruces de plástico, discos, tornillos para la fijación. Soportes comprados para el motor. También se incluyen tornillos de montaje, rodamientos y discos. controlador de carga. Recibirá energía de los paneles solares y la transferirá a la batería.
Comencemos a trabajar con nuestras propias manos con llenado electrónico. El diagrama de seguimiento para el panel solar se encuentra a continuación.  Diagrama de cableado, placa, programa de edición de placa: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Diagrama de cableado, placa, programa de edición de placa: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
El circuito es muy simple y fácil de repetir. Es la más exitosa de varias opciones probadas. Pero incluso su autor tuvo que cambiar un poco. Tuve que cambiar los valores de resistencias variables y fijas, se diseñó un circuito de placa de circuito impreso.
Para empezar, imprimamos la placa de circuito del rastreador en papel especial. Esta es la tecnología de planchado láser. El papel tiene un aspecto brillante. En el reverso, es el mate habitual. Debe imprimir en una impresora láser en el lado brillante. Después del contacto con la plancha, se debe dejar enfriar y el papel se desprende fácilmente de la capa.

Antes de transferir, la textolita debe ser desengrasada. Lo mejor es usar papel de lija fino. Adjuntamos el patrón al tablero y lo planchamos con una plancha caliente durante 2 minutos.
Ahora necesita grabar la placa de seguimiento. Se puede usar persulfato de amonio. Se vende en tiendas de radio. La misma solución se puede utilizar varias veces. Es deseable calentar el líquido a 45 grados antes de su uso. Esto acelerará enormemente el proceso de grabado. Después de 20 minutos, el tablero se completó con éxito. Ahora necesitas quitar el tóner. Nuevamente, use papel de lija o acetona.
Ahora puedes hacer un agujero en el tablero. Puede comenzar a soldar piezas.
El corazón del seguidor solar es el amplificador operacional lm324n. Dos transistores tipo 41c, tipo 42c. Un condensador cerámico 104. El autor del desarrollo reemplazó muchos detalles con el tipo smd. En lugar de 5408 diodos, se utilizaron sus análogos del tipo smd. Lo principal es usar al menos 3 amperios. Una resistencia para 15 kiloohmios, 1 para 47 kiloohmios. dos fotoresistores. 2 resistencias de sintonización para 100 y 10 kilo-ohmios. Este último es responsable de la sensibilidad del fotosensor.
 Un helióstato, o en su defecto, un seguidor, es un dispositivo de seguimiento del sol, en nuestro caso, de giro de los paneles solares para que queden siempre perpendiculares al sol. No es ningún secreto que es en este caso que el panel solar da la máxima potencia. En el diagrama anterior, el dispositivo de seguimiento solar (helióstato) usa control de pulso y, sin ayuda humana, puede orientar la matriz solar hacia la mejor iluminación.
Un helióstato, o en su defecto, un seguidor, es un dispositivo de seguimiento del sol, en nuestro caso, de giro de los paneles solares para que queden siempre perpendiculares al sol. No es ningún secreto que es en este caso que el panel solar da la máxima potencia. En el diagrama anterior, el dispositivo de seguimiento solar (helióstato) usa control de pulso y, sin ayuda humana, puede orientar la matriz solar hacia la mejor iluminación.
El circuito de helióstatos consta de un generador de reloj (DD1.1, DD1.2), dos circuitos integradores (VD1R2C2, VD2R3C3), igual número de modeladores (DD1.3, DD1.4), un comparador digital (DD2), dos inversores (DD1. 5, DD1.6) y un interruptor de transistor (VT1-VT6) para la dirección de rotación del motor eléctrico M1, que controla la rotación de la plataforma en la que está instalada la batería solar. Con el encendido, el generador de los elementos DD1.1, DD1.2 genera pulsos de reloj que siguen a una frecuencia de aproximadamente 300 Hz. Cuando el dispositivo está en funcionamiento, se comparan las duraciones de los pulsos generados por los inversores DD1.3, DD1.4 y los circuitos integradores VD1R2C2, VD2R3C3. Su inclinación varía según la constante de tiempo de integración, que, a su vez, depende de la iluminación de los fotodiodos VD1 y VD2 (la corriente de carga de los condensadores C2 y C3 es proporcional a su iluminación). Las señales de las salidas de los circuitos integradores se alimentan a los modeladores de nivel DD1.3, DD1.4 y luego a un comparador digital hecho en los elementos del microcircuito DD2. Dependiendo de la relación de las duraciones de los pulsos de entrada al comparador, aparece una señal de bajo nivel en la salida del elemento DD2.3 (pin 11) o DD2.4 (pin 4). Con la misma iluminación de los fotodiodos, las señales de alto nivel están presentes en ambas salidas del comparador. Se requieren inversores DD1.5 y DD1.6 para controlar los transistores VT1 y VT2. Un alto nivel de señal en la salida del primer inversor abre el transistor VT1, en la salida del segundo - VT2. Las cargas de estos transistores son claves en los potentes transistores VT3, VT6 y VT4, VT5, que cambian la tensión de alimentación del motor eléctrico M1. Los circuitos R4C4R6 y R5C5R7 suavizan las ondas en las bases de los transistores de control VT1 HVT2. El sentido de giro del motor cambia en función de la polaridad de la conexión a la fuente de alimentación. El comparador digital no permite que todos los transistores clave se abran al mismo tiempo y, por lo tanto, garantiza una alta confiabilidad del sistema.
Por la mañana con la salida del sol, la iluminación de los fotodiodos VD1 y VD2 será diferente, y el motor eléctrico comenzará a girar el panel solar de oeste a este. A medida que disminuye la diferencia en la duración de los pulsos de los moldeadores, la duración del pulso resultante disminuirá y la velocidad de rotación de la batería solar se ralentizará gradualmente, lo que garantizará su posicionamiento preciso en el sol. Así, con el control de pulsos, la rotación del eje del motor se puede transmitir directamente a la plataforma con una batería solar, sin el uso de una caja de cambios. Durante el día, la plataforma del panel solar girará con el movimiento del sol. Con el inicio del crepúsculo, la duración de los pulsos en la entrada del comparador digital será la misma y el sistema entrará en modo de espera. En este estado, la corriente consumida por el dispositivo no supera los 1,2 mA (en modo orientación, depende de la potencia del motor).
Si el diseño se complementa con un bloque de deflexión vertical ensamblado de acuerdo con un esquema similar, es posible automatizar completamente la orientación de la batería en ambos planos. Si de repente no se indicaron microcircuitos en el diagrama, se pueden reemplazar con microcircuitos de las series K564, K176 (con una tensión de alimentación de 5 ... 12 V). Los transistores KT315A son intercambiables con cualquiera de las series KT201, KT315, KT342, KT3102 y KT814A, con cualquiera de las series KT814, KT816, KT818, así como con germanio P213-P215, P217. En este último caso, se deben conectar resistencias con una resistencia de 1 ... 10 kOhm entre los emisores y las bases de los transistores VT3-VT6 para evitar que se abran accidentalmente debido a una corriente inversa significativa. En lugar de fotodiodos FD256, puede colocar piezas de células solares (conectadas con polaridad), fototransistores sin circuitos de polarización, así como fotorresistores, por ejemplo, SF2, SFZ o FSK de cualquier modificación. Solo es necesario seleccionar (cambiando la resistencia de la resistencia R1) la frecuencia del generador de reloj de acuerdo con la operación confiable del comparador digital. Se utiliza un filtro de luz verde para proteger los fotodiodos de una irradiación excesiva. Se coloca una cortina opaca entre los fotosensores. Se fija perpendicular a la placa de forma que cuando cambia el ángulo de iluminación oscurece uno de los fotodiodos. 










