Väga sageli paigaldatakse päikesepaneelid jäigalt ja püsivalt. See on lihtne, kuid mitte eriti tõhus, kuna päeval liigub päike üle taeva ja päikesepaneelide poolt vastuvõetava valgusenergia hulk muutub. Päikesepatarei maksimaalne tagasitulek on võimalik ainult siis, kui valgus langeb paneelile selle tasapinnaga risti. Selleks, et päikesekiired langeksid päikesepaneelile alati risti. kasutatakse erineva konstruktsiooniga ja erineva keerukusega päikesejälgimissüsteeme. Kuigi selline süsteem muudab päikesepaneelide paigaldamise keerulisemaks, võimaldab see neist maksimumi võtta. Päikesepaneelid ei ole ikka veel odavad ning nendesse investeerides tahame kindlasti realiseerida nende täieliku potentsiaali.
Tihti saavad kõige lihtsamad jälgimissüsteemid paneeli pöörata ainult ühel teljel. Selliste seadmete hulka kuulub paar fotosensorit ja paar komparaatorit, mis juhivad ühte elektrimootorit, mis sisaldub kõige lihtsama H-silla diagonaalis. Sellised seadmed suurendavad loomulikult ka päikesepaneelide efektiivsust, kuid nad ei tee seda eriti tõhusalt, kuna töötavad ainult ühe telje piires. See artikkel kirjeldab väga lihtsat päikesejälgimissüsteemi, mis aga suudab paneeli liigutada kahe telje suunas, mis suurendab päikesepatareide efektiivsust. Töötamise ajal püüab süsteem paneeli pidevalt paigutada nii, et selle tasapind oleks alati langeva päikesevalgusega risti ja saada akust maksimaalselt elektrienergiat. Jälgimisseade jälgib päikest koidikust kuni loojangu viimaste kiirteni ja jätkab automaatselt tööd järgmisel hommikul.
Seadme skeem sisaldab LM339 kiipi, mis on neli analoogkomparaatorit ühises pakendis. Kaht mootorit juhib spetsiaalne L293D mikroskeem - kahekordne H-sild. Elektriskeem sisaldab lisaks mikroskeemidele mitmeid diskreetseid elemente. Valguse intensiivsuse anduritena kasutatakse fototakisteid LDR1 - LDR4, mis määravad päikesepaneeli asukoha päikesekiirte suhtes.
Fototakisti plokk koos LM339 komparaatoriga genereerib juhtsignaale L293D mootoridraiveri jaoks. Fototakistid LDR1 ja LDR2 on fikseeritud päikesepaneeli nurkades X-teljel, LDR3-s ja LDR4-s - Y-teljel.madal pingetasemed.
Mõelge töö algoritmile süsteem selle osa näitel, mis vastutab piki X-telge liikumise eest.Kui fototakisti LDR2 saab rohkem valgust kui LDR1, siis LDR2 takistus muutub väiksemaks kui LDR1 takistus.Kõrgem pingetase ilmub komparaatorite A1 ja sisenditesse. A2 (4, 7). Sel juhul ilmub komparaatori A2 (1) väljundisse kõrge pingetase. Mootor M1 hakkab pöörlema ühes suunas (näiteks vastupäeva), pöörates päikesepaneeli.
Kui LDR1 saab rohkem valgust kui LDR2, muutub selle takistus väiksemaks kui LDR2 takistus, vähendades seeläbi pinget võrdlussisendites (4, 7). Komparaatori A2 väljundis (2) ilmub kõrge tase ja mootor hakkab pöörlema vastupidises suunas (näiteks päripäeva). Täpselt samamoodi toimib jälgimine mööda Y-telge.
Alloleval joonisel on kujutatud päikesejälgimissüsteemi võimalik konstruktsioon. Skeemi saab kokku panna ühtsele leivaplaadile või suunata selle jaoks tavapärase trükkplaadi.
Pärast päikesepaneelide kasutamist elektrienergia tootmiseks tööstuslikus mastaabis hakkasid insenerid ja disainerid otsima võimalusi selliste elektrijaamade efektiivsuse tõstmiseks. Päikese valguse summaarne hajumine, mille määrab päikesekiirte langemise suuna muutus fotoelementidele, ei võimaldanud päikesepaneele tõhusalt kasutada kogu päevavalguse ajal. Väljapääs sellest olukorrast leiti üsna kiiresti – päikesepaneele hakati paigaldama päikesejälgimissüsteemiga ühendatud liikuvale alusele.
Nagu teate, on päikesepaneelidest maksimaalse võimsuse saamiseks vajalik, et päikesekiired tabaksid akude tasapinda risti. Selle kiirte suunaga võib päikesepaneelide efektiivsus ulatuda 50-55% -ni. Püsipaigaldatud akude puhul saab seda näitajat päikesevalguse langemisnurga muutumise tõttu vähendada 10-15%-ni.
Päikese jälgimise seade koosneb kahest põhiosast:
1. Juhtskeem, mis määrab Päikese asukoha. Päikese jälgimisseadme või muul viisil jälgija (Solar Tracker) lihtsaim skeem on näidatud allpool. Päikese asukoha määramiseks kasutatakse kahte fototakistit. Skeem sisaldab:
- LM1458 operatsioonivõimendi kiip (K140UD20);
- transistorid BD139 (KT815G, KT961A) ja BD140 (KT814G, KT626V);
- fototakistid;
- dioodid 1N4004 (KD243G);
- takistid ja häälestustakistid.

2. Akude pööramise ja kallutamise mehhanismid sõltuvalt päikesekiirte suunast. Kallutamismehhanism võimaldab selliseid jälgimissüsteeme kasutada mis tahes geograafilistel laiuskraadidel: päikesepaneelide paigaldamisel alale, mis vastab 320 põhjalaiusele, tuleb seadme telg pöörata 320 horisondi suhtes. Jälgimissüsteemi kõigi mehhanismide ajamid on ehitatud elektrimootorite baasil, mida juhtsüsteem mõjutab. Elektrimootoreid ja juhtimissüsteemi toidavad päikesepaneelid ise, seega on sellised paigaldised autonoomsed.
Nagu näete, on päikesejälgija skeem ja seade üsna lihtsad. Loomulikult kasutatakse tööstuslikus mastaabis keerukamaid süsteeme, kuid sarnase skeemi saab iseseisvalt kokku panna kodupaigaldise jaoks päikesepaneelidel põhineva elektrienergia tootmiseks.

Võrgustik sisaldab suurel hulgal valmis skeeme ja lahendusi päikese jälgimissüsteemide jaoks. Seega, kui on vajadus päikesepaneelide disaini täiustada ja nende jõudlust suurendada, on alati võimalus seda ise teha.
Päikesejälgija on elektrooniline-mehaaniline süsteem, mis on loodud päikesepaneelide suunamiseks Päikesele. Süsteem jälgib Päikese asukohta taevas ja juhib servot, mis pöörab paneele sobivas suunas. Sellise jälgija kasutamine võimaldab teil saada päikesepaneelidest maksimaalse jõudluse.
Enamik Internetist leitud isetehtud jälgijaid on kokku pandud Arduino peale, Päikese asukoha määramiseks kasutatakse fotosensoreid. Sõltuvalt valgustuse astmest ja fotosensorite suhtelisest asendist tehakse pööre maksimaalse valgustuse suunas. Sellel meetodil on puudused: pole teada, kuidas süsteem pilvise ilmaga käitub; madal mürakindlus kuuvalgusele ja eredatele valgusallikatele, samuti üksikutele pilvedele reageerimisel.
Ülaltoodud puuduste tõttu töötasin välja oma versiooni ökonoomsest servojõul töötavast päikesejälgijast, mis võimaldab jälgida Päikest kogu nähtaval taevas igal ajal, olenemata geograafilisest asukohast.
Päikese asukohta taevas saab määrata mitte ainult fotosensorite valgustuse, vaid ka taevamehaanika valemite abil, mis põhinevad vaatluspunkti geograafilistel koordinaatidel ja täpsel ajal. Nüüd on taevamehaanikaga seotud palju määratlusi ja valemeid, nii et olge valmis oma keerdkäike pingutama). Päikesepaneelide suunamiseks peate määrama Päikese horisontaalsed koordinaadid, see on kõrgus ja asimuut. Selle koordinaatsüsteemi keskpunkt langeb kokku vaatleja asukohaga, arvutused tehakse matemaatilise horisondi tasapinna suhtes.
Kõrgus h on nurk mati tasapinna vahel. horisont ja suund valgustini, loendatuna 0⁰ kuni +90⁰ seniidini ja 0⁰ kuni -90⁰ madalaimini.
Asimuut A – keskpäevase joone (jämedalt öeldes lõunasuuna) ja mati tasapinna lõikejoone vaheline nurk. horisont valgusti vertikaalse ringi tasapinnaga. Seda loetakse lõunapunktist taevasfääri igapäevase pöörlemise suunas vahemikus 0⁰ ... 360⁰ või 0⁰ kuni +180⁰ läänes ja 0⁰ kuni -180⁰ idas. Tähe horisontaalsed koordinaadid muutuvad Maa igapäevase pöörlemise tõttu pidevalt.
Allpool on toodud valemid valgusti kõrguse ja asimuuti arvutamiseks:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ maksumus);
A = atan2 (cos
kus δ on tähe deklinatsioon, t on tähe tunninurk, ϕ on vaatluspunkti laiuskraad (0⁰…+90⁰ põhjapoolkeral, 0⁰…-90⁰ lõunapoolkeral, 0⁰ on ekvaator).
Funktsiooni atan2(y, x) dekrüpteerimine: 
Nagu näete, on horisontaalsete koordinaatide arvutamiseks vaja arvutada tähe deklinatsioon ja tunninurk. Need koordinaadid viitavad esimesele ekvaatori koordinaatide süsteemile, kus põhitasand on taevaekvaatori tasapind.
Deklinatsioon δ - nurk taevaekvaatori tasandi ja valgusti suuna vahel, mõõdetakse 0⁰ kuni +90⁰ põhjapooluse suunas ja 0⁰ kuni -90⁰ lõunapooluse suunas.
Tunninurk t on kahetahuline nurk taevameridiaani tasandi ja valgusti deklinatsiooniringi vahel. Seda loetakse taevasfääri igapäevase pöörlemise suunas, taevaekvaatori ülemisest punktist läänes, 0⁰ ... 360⁰ piires või 00:00 kuni 24:00 (tundi). Samuti saab tunninurka mõõta vahemikus 0⁰ kuni 180⁰ (00:00 kuni 12:00) läänes ja 0⁰ kuni –180⁰ (00:00 kuni -12:00) idas. Tunninurk võrdub 0-ga tähe ülemise kulminatsiooni hetkel, Päikese jaoks tõelisel keskpäeval (mitte alati samal ajal, kui kell näitab kohaliku aja järgi 12:00).
Päikese deklinatsioon muutub aastaringselt (ebaühtlaselt) vahemikus -23,43⁰ kuni +23,43⁰, mis on tingitud Maa orbitaalsest liikumisest ümber Päikese ega ole seotud Maa igapäevase pöörlemisega. Päikese deklinatsiooni määramiseks igal aastapäeval on kõige lihtsam viis 4-aastase tsükli keskmiste deklinatsiooni väärtuste tabelist. Tabeli saab alla laadida artikli lõpus.
Tähe tunninurk muutub päeva jooksul (Maa igapäevase pöörlemise tõttu), seda saab arvutada, teades tegelikku päikeseaega:
t \u003d Ts.ist - 12:00 h, (-12:00 ... + 11:59),
kus Ts.ist on tõeline päikeseaeg (00:00…23:59h).
Tõelist päikeseaega saab arvutada, teades kohalikku aega, ajavööndit ja vaatluspunkti pikkuskraadi:
Ts.ist = Ts.av + EOT või Ts.ist = UTC + λ + EOT,
kus Ts.av on keskmine päikeseaeg mingis Maa punktis (sõltub punkti pikkuskraad), UTC on universaalne koordineeritud aeg, λ on vaatluspunkti pikkuskraad tunniühikutes, EOT on aja võrrand.
Koordineeritud universaalaega saab arvutada kohaliku aja (Tm) ja ajavööndi (N) järgi: UTC = Tm – N. Asukoha pikkuskraad λ mõõdetakse 0⁰ kuni 180⁰ algmeridiaanist ida pool (idapikkuskraad) ja 0⁰ kuni -180⁰ läände (läänepikkuskraad). Ülaltoodud valemiga asendamisel tuleb pikkuskraad teisendada tunniühikuteks (1⁰ = 4 min).
EOT-aja võrrand näitab erinevust keskmise päikeseaja ja tegeliku päikeseaja vahel, kuna Päikese igapäevane liikumine on ebaühtlane Maa orbiidi elliptilisuse ja ka Maa telje kalde tõttu ekliptika tasapinna suhtes:
EOT = 9,87 ∙ sin2B – 7,53 ∙ cosB – 1,5 ∙ sinB,
kus B = (360⁰ (N-81))/365, N on päeva järjekorranumber aastas.
Seega muutub aasta jooksul aja võrrandi väärtus -14,3 minutilt +16,4 minutile.
Allpool on graafik, kuidas ajavõrrand aasta jooksul muutub: 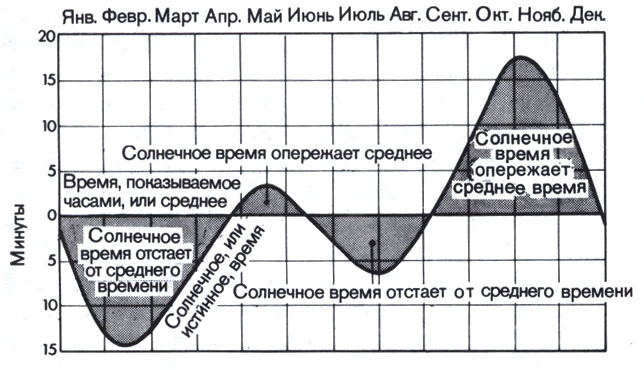
Pidin kõik need arvutused mikrokontrolleri programmi juhtima, ma ei julgenud assembleris kirjutada, nii et hakkasin SI-d õppima, õige tulemuse saamiseks pidin nädalaid valemite ja arvutustega askeldama, SI-d uurides. Selle tulemusena õnnestus mul kirjutada töötav programm, kusjuures arvutusviga ei ületa ±1⁰.
Päikesejälgija töötati välja väikese päikesepatarei jaoks, mille võimsus on 2 W ja pinge 6 V, et laadida liitiumioonakut, kuid parem on kasutada võimsamat, vähemalt 4 W akut. Elektriajamitena kasutasin MG996R servosid (saate osta Hiinast, link on toodud artikli lõpus). Lisaks ostsin spetsiaalsed klambrid alt-asimuutpaigalduse kokkupanemiseks (link tellimiseks artikli lõpus). Kokkupandud disain võimaldab päikesepatarei kõrguse ja asimuuti järgi orienteerida, asimuutservo on aga paigal ja pöörab kõrgusservot koos klambritega.
Allpool on päikesejälgija diagramm: ![]()
Ahel põhineb PIC16F876A mikrokontrolleril, millel on märkimisväärne kogus mälu ja palju välismooduleid. Kogu konstruktsiooni toiteallikaks on liitium-ioon aku, mida laetakse vastavalt päikesepatareilt TP4056 kiibil põhineva mooduli kaudu, see on liitiumioonakude spetsiaalne laadimiskontroller (tellimislink artikli lõpus) . Praeguse kellaaja ja kuupäeva määramiseks kasutab skeem moodulit (link tellimiseks artikli lõpus). Kell on üsna täpne, aja triiv on ± 2 minutit aastas, kirjutasin neist juba põhjaliku artikli, soovijad saavad tutvuda. Parameetrite kuvamiseks kasutatakse digitaalset indikaatorit (link tellimiseks artikli lõpus).
Liitiumioonaku maksimaalne pinge ei ületa 4,1 V, millest servode toiteks ei piisa, seega on vooluringi lisatud MT3608 kiibil põhinev astmemoodul (tellimislink artikli lõpus ). Mooduli minimaalne sisendpinge on 2V, maksimaalne koormusvool 2A, väljundpinge reguleerimiseks on moodulil mitme pöördega muutuv takisti. Energia säästmiseks ei anta servodele voolu pidevalt, vaid ainult võlli asendi muutmiseks. Toide lülitatakse p-kanaliga väljatransistori VT1 abil, muunduri moodulit juhitakse samuti mikrokontrollerist.
Moodulplaat ei anna juhtimiseks kontakti, seega on vaja traat täiendavalt jootma MT3608 kiibi 4. kontaktiga, see on muunduri sisse / välja sisend. Tahvlil on see tihvt ühendatud “+” toiteallikaga, kõigepealt peate lõikama selle tihvti jaoks sobivad rajad (selleks peate mikroskeemi lahti jootma) või tõstma tihvti plaadi kohale. Mooduliplaadile on paigaldatud pingejagaja takisti kiip, selle takisti takistuse suurendamine vähendab ka puhkerežiimis tarbimist, vahetasin teise vastu, takistusega 9,1 kOhm, algselt oli 2,2 kOhm. Pärast asendamist peate servode toiteks seadma väljundpinge umbes 5-5,5 V, alloleval joonisel: 
Täiendamist vajab ka kellamoodul, voolutarbimise vähendamiseks tuleb jootma 24c32 mälukiip, “POWER” LED, aga ka takisti (200 oomi), mille kaudu antakse akule väline toitepinge. , miks hiinlased seda tegid, jääb arusaamatuks, sest aku pole laadimiseks mõeldud, vaata allolevat pilti: 
HL1 LED on seatud näitama sidetõrget DS3231 kellaga (I2C liidese kaudu), LED hakkab vilkuma, kui kell ei reageeri.
Alt-asimuti seadistuse kokkupanemist tuleks alustada siis, kui servod on seatud keskmisesse asendisse, see juhtub seadme esmakordsel sisselülitamisel, indikaatoril kuvatakse kiri "Sent". Asimuudiservo on soovitav paigaldada plaadile, mis toimib paigalduse alusena, või alusele, nii et väljundvõll on suunatud vertikaalselt ülespoole. Järgmiseks tuleb kinnitada kõrguse servoklamber, esmalt tuleb kronsteini külge kruvida liughülss, seejärel adapterhülss. Klamber tuleb seada asimuudiservo pika küljega risti, nagu on näidatud fotol: 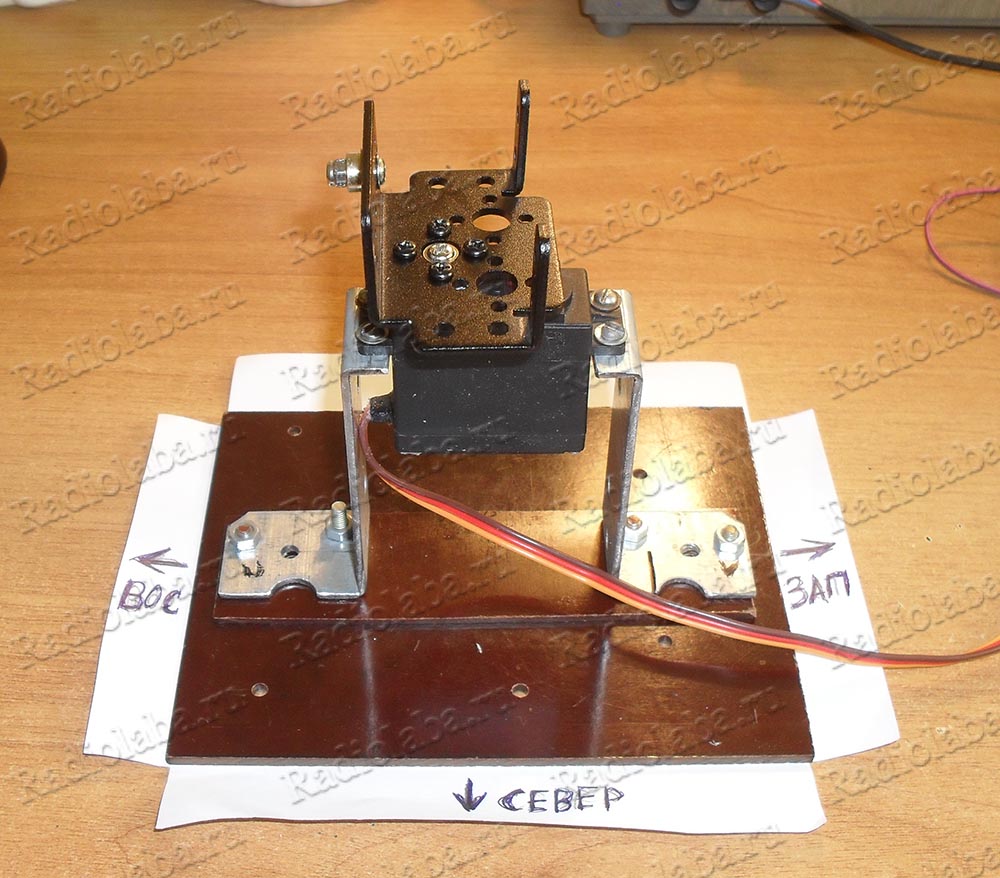
Kokkupanemisel on raske saavutada risti asendit, kuid see pole vajalik, lubatud on kõrvalekalded ± 5-10 kraadi piires. Edaspidi tarkvara kohandamine kõrvaldab selle kõrvalekalde.
Pärast kõrgusservo kinnitamist jääb alles kinnitada kandekronstein, esmalt proovige servovõlli adapterhülssi, valige selline asend, et kandekronstein oleks pärast paigaldamist suunatud vertikaalselt ülespoole. Jällegi pole vaja täpset asukohta määrata, nagu ma varem ütlesin. Installimise üldvaade on näidatud järgmisel fotol: 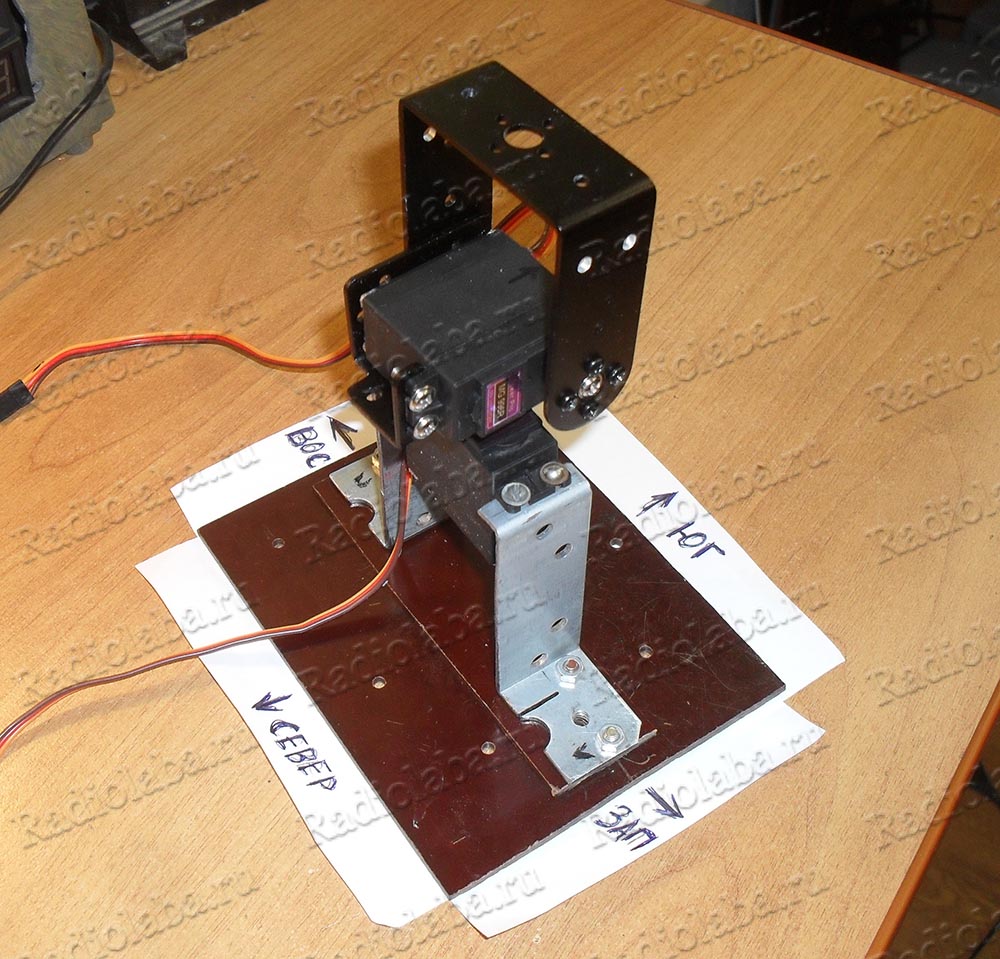
Järgnevalt on toodud servode äärmiste positsioonide reguleerimise protseduur. Reguleerimine peaks toimuma tasasel pinnal, kui servovõll on asimuutselt vertikaalne (pöörlemistelg on suunatud piki loodi). Pärast nupu "Enter" vajutamist pöördub tugiklamber tingimusliku põhja poole ja võtab horisontaalasendi (indikaatorile kuvatakse kiri "põhja"): 
Kui horisontaaltasapinnast on kõrvalekalle, peate klambri asendit reguleerima nuppude "Seadista" ja "Tühjendamine" abil. Seega reguleeritakse servo äärmist asendit. Edasi, kui vajutada nuppu “Enter”, pöördub sulg tingimusliku lõuna poole (indikaatorile on kirjutatud lõuna). Vajadusel reguleerige kronsteini horisontaalset asendit ülalkirjeldatud viisil.
Edasine “Enter” nupu vajutamine pöörab käe tavapärase ida poole (indikaatoril on kiri EASt). Nupud “Set” ja “Discharge” korrigeerivad suunda, samas kui asimuutservoajami korpusele on mugav keskenduda, on vajalik, et sulg oleks ülalt vaadates suunatud piki kere pikka külge: 
Järgmine kord, kui vajutate nuppu "Enter", pöördub sulg lääne poole (indikaator näitab kirja WESt), reguleerimine toimub ülalkirjeldatud viisil.
Korrektsiooni tulemusena pööratakse sulg kõrguse ja asimuuti 180⁰ piires, parandusväärtused salvestatakse mikrokontrolleri EEPROM-i mällu. Pärast sisestusnupu vajutamist võtab sulg korrigeeritud suuna tingimusliku lõuna poole. Päikesepatarei õigeks orientatsiooniks peaks suund tingimusliku lõuna poole näitama lõuna tegelikku punkti antud piirkonnas ja asimuuti servo veovõll paikneb vertikaalselt piki loodi.
Pärast sisestusnupu uuesti vajutamist tuleb määrata kellaaeg, kuupäev, ajavöönd, asukoha koordinaadid ja puhkerežiimi kestus. Vastavalt sellele kuvatakse indikaatoril iga parameetri kohta järgmised pealdised:
– kohalik aeg, vaikimisi 0 h 0 min;
– asukoha pikkuskraad, vaikimisi -0 kraadi. 0 min. (läänepikkuse jaoks pannakse miinusmärk “-”);
– asukoha laiuskraad, vaikimisi -0 kraadi. 0 min. (lõunalaiuskraadi jaoks pannakse miinusmärk “-”);
– ajavöönd, vaikimisi -0, (läänepikkusele pannakse miinusmärk “-”);
– puhkerežiimi kestus, vaikimisi 1 min.
Nupud "Tühjenemine" ja "Määra" määravad parameetrite väärtused, kui vajutate nuppu "Sisesta", kirjutatakse kellaaja ja kuupäeva väärtused , ülejäänud parameetrid salvestatakse mikrokontrolleri EEPROM-i mällu. Pärast kõigi parameetrite sisestamist kuvab indikaator kirja SUCCES (1 sekundiks, seejärel kustub indikaator), seejärel on installimine vastavalt sisestatud parameetritele suunatud Päikesele.
Energia säästmiseks sihitakse Päikesele teatud aja möödudes, mis on määratud parameetris Sleep mode kestus. Pärast osutamist lülitatakse servod pingest välja, mikrokontroller läheb puhkerežiimi, jälgija kogutarbimine väheneb 160 μA-ni. "Une" kestust saab määrata 1-255 minuti piires.
Jälgija uuesti sisselülitamisel (pärast toite väljalülitamist) kontrollitakse esmalt EEPROM-i mälu, kui salvestatud parameetrid on õiged, jätkab jälgija päikese jälgimist, samal ajal kui digitaalne indikaator jääb puhkeolekusse ega lülitu sisse säästa energiat. Tavaliselt saate indikaatori toite välja lülitada pärast parameetrite esialgset sisestamist. Parandusrežiimi uuesti sisenemiseks peate hoidma nuppu "Seadista" ja lülitama jälgija sisse. Kui EEPROM-ist loetud parameetrid on valed või puuduvad, läheb see ka parandusrežiimi.
Täiendavalt lisasin mikrokontrolleri programmi põhiparameetrite väljastamise funktsiooni UART liidese kaudu. Pärast Päikese asukoha arvutamist edastab mikrokontroller praeguse kellaaja väärtuse, kuupäeva, päeva seerianumbri, seadistamise ajal sisestatud asukoha koordinaadid, samuti Päikese kõrguse ja asimuudi praegused väärtused. Iga parameeter algab sümboliga "$" ja lõpeb sümbolitega "\r", "\n". Neid andmeid saab arvutis vaadata, ühendades jälgija USB-UART-adapteri kaudu. Terminaliprogrammi seadistustes tuleb määrata järgmised seadistused: edastuskiirus 9600 bps, 8 andmebitti, üks stoppbitt. Allpool on terminaliprogrammi ekraanipilt: ![]()
MG996R servod ei ole korpuse sees niiskuse eest kaitstud, seega välistingimustes kasutamise korral tuleb servod tihendada. Eemaldage ümbrise alumisest küljest neli polti ja kandke korpuse ühenduskohtade vahele neutraalset silikoontihendit ning manseti ümber hermeetikut, et juhtmed korpusesse sisestada. Lisaks saate käigukasti käikudele määrida määret, kuna tehase oma praktiliselt puudub. Läbivaatuste kohaselt sobib SHRUS-4 määre kõige paremini, erinevalt litoolist ei külmu see külmas. Ülemise augu tihendamiseks võib väljundvõllile panna silikoonrõnga ja võllile paigaldatud adapterilt tuleb eemaldada faasid, et mitte tekitada liigset hõõrdumist.
Tugiklambri külge kinnitasin ristkülikukujulise tekstoliitplaadi, millele liimisin kahepoolse teibi abil päikesepatarei. Kuna servod on suurema osa ajast pingest väljas, on päikesemassiivi raskusjõu mõjul võimalik võlli kõrgust pöörata. Selle vältimiseks kinnitasin kandekronsteini külgedele pikad nurkadest ja plaatidest valmistatud vastukaalud. Vastukaalude massi muutmisega tasakaalustasin konstruktsiooni piki kõrguse pöörlemistelge.
Jälgija juhib, kui Päike on horisondi kohal, st kui selle kõrgus on suurem kui 0⁰. Kui Päike loojub horisondist allapoole (negatiivne kõrguse väärtus), suunab jälgija päikesemassiivi itta, edasine jälgimine jätkub päikesetõusul. Jälgimine toimub kogu nähtaval taevapiirkonnas.
Päikese ja tähtede igapäevast liikumist saab arvutis vaadata Stellariumi programmis, mis on tasuta virtuaalne planetaarium, mis kuvab realistlikku tähistaevast. Programm kuvab valgustite liikumist taevas, igal ajal on näha Päikese ja tähtede asukoht, samuti on saadaval andmed erinevate koordinaatide kohta.
Paigaldasin seadme trükkplaadile, mille disainisin nii, et see sobiks GAINTA G1202G korpusega. Tahvlil on koht hüppaja (hüppaja) jaoks, millega saab digitaalnäidiku toite välja lülitada.
Väljatransistori VT1 saab asendada IRLML2244, IRLML6402-ga. Võite kasutada ka SOIC-8 paketis olevaid transistore (peate plaadi uuesti tegema): IRF9332, IRF9310, IRF9317.
Negatiivsete temperatuuride korral kaotavad liitiumioonakud märkimisväärse mahutavuse (elektrolüüdid külmuvad), akusid ei ole soovitatav kasutada temperatuuril alla +5 ⁰C, kuna see toob kaasa ressursi enneaegse vähenemise. Seega, kui plaanite jälgijat kasutada pakase ilmaga, on parem kasutada LiFePO4 liitium-raud-fosfaat-akut. Seda tüüpi akud on külmakindlamad, töötemperatuuri vahemik on -30 ⁰C kuni +55 ⁰C, maksimaalne pinge on 3,65 V, minimaalne 2 V, keskmine 3,3 V, st madalam kui Li oma -ioon. Samuti on eeliste hulgas stabiilne tühjenduspinge 3,2 V lähedal. Artikli lõpus on lingid aku tellimiseks, samuti laadimismoodul.
Päikesejälgija baasil saab luua väikese autonoomse süsteemi, mis ei vaja välist voolu, näiteks kaugilmajaam või suvila valvesüsteem vms. Saate asendada servod võimsamate vastu ja paigaldada suurema päikesepaneeli. Päikesepaneelide vooluringi on võimalik kohandada pingega 12, 18 V, laadida mitut järjestikku ühendatud akut, kuid selleks tuleb vooluringi vahetada ja kasutada muid laadimismooduleid.
Allpool on lingid päikesejälgija kokkupanemiseks vajalike moodulite ja komponentide tellimiseks:
Päikesepatarei 6V 4,5W
Reaalajas kella moodul DS3231
Digitaalne indikaator MAX7219 draiveril
Liitiumioonaku laadimismoodul TP4056-l
Aku LiFePO4 6500mah
Aku eluiga 1800mah
LiFePO4 aku laadimismoodul
Servo MG996R
Klambrid alt-asimuutpaigalduse kokkupanekuks MG996R servodele
Võimendusmuundur MT3608-l
![]()
![]()
![]()
![]()
![]()
![]()
Alustuseks tasub ilmselt öelda, mida see artikkel päikesejälgija all tähendab. Lühidalt öeldes on seade liigutatav alus päikesepaneelile, mis on vajalik selleks, et meie parasvöötme laiuskraadidel paneel koguks piisaval hulgal valgust, muutes oma asendit päikese järgi.
Sel juhul pandi päikesejälgija prototüüp kokku Arduino baasil. Platvormi pööramiseks horisontaal- ja vertikaalteljel kasutatakse servoajameid, mille pöördenurk sõltub fototakistitele langeva valguse võimsusest. Kerena on kasutatud kõigi lemmik Nõukogude metallkonstruktorit.
Kasulik oleks mainida, et see kõik sai tehtud kursusetööna, mistõttu ei viitsinud ma päikesepaneeli ennast ja akut soetada ja monteerida, kuna nende olemasolu pole jälgija tööga seotud. Ettekäändeks võin öelda, et nõukogude metallkonstruktori võimalused on tohutud, nii et väikese päikesepaneeli külge kruvimine telefoni laadimiseks ei ole sellise soovi tekkimisel keeruline.
Niisiis, mida koostamisel kasutati:
Ootamatult nimekirja ilmunud kõnelejalt nõuti kõrgtehnoloogilise efekti suurendamist. Fakt on see, et servod saavad pöörata ainult 180 kraadi ja me ei vaja rohkem, kuna jälgime päikest. Aga projekti testides, kui kaks minutit demonstratsiooni päikest õieti jälgida ei saa, selgus, et tore oleks märku anda, mis hetkel tasub taskulambiga vehkimine lõpetada, sest servo on surnuteni jõudnud tsooni. Selleks lisati ülaltoodud üleskutse.
Niisiis, alustame jälgija kogumist. Alustuseks jagame eelseisva töörinde tinglikuks neljaks etapiks: päikesepaneelide aluse kokkupanek ja servode paigaldamine, valgustundlike elementide kinnitamine kokkupandud konstruktsioonile, jootmine ja Arduino koodi kirjutamine.
Fototakistid on üsna kindlalt korpuse küljes kinni, ainuke asi, millega tasuks tööd teha, on nende asukoha täpsus platvormil: nüüd ei vaata need piisavalt risti üles, mis võib perfektsionistid häirida ja pöörlemise täpsust veidi rikkuda.
Natuke vooluringi: valgustundlike elementide ühendamine toimub vastavalt pingejaguri ahelale, mille jaoks olid vajalikud elementide loendis näidatud väljundtakistid. Kõik fototakistid on joodetud ühise tihvti külge, mis on ühendatud Arduino viievoldise väljundvõimsusega. Mugavuse ja esteetika huvides on fototakistite jalad joodetud kahe kolmesoonelise isoleeritud juhtme kontaktide külge (üks kontakt jäi kasutamata ja peidetuks). Kõik vooluahela üksikasjad on näha alloleval diagrammil.




Kood
#kaasa

“Bang-bang” kanalil näidati, kuidas teha paneelidele omatehtud päikesejälgijat. Need pöörlevad automaatselt pärast päikest, suurendades elektrijaama efektiivsust.
Teil on vaja kahte päikesepaneeli võimsusega 3,5 vatti. Väljundis on üle 6 volti, mis kahe aku järjestikku ühendamisel annab rohkem kui 12 volti. USB pesa tagaküljel. Kolm väljundit kolmest aku segmendist. Igaüks neist genereerib 2 volti. See tähendab, et vajadusel saate vastavalt ühendada ja saada 2, 4, 6 volti.

Järgmine oluline sõlm on kaks servot. Üks pöörab päikesepatarei horisontaalselt ja teine vertikaalselt. Need draivid pole lihtsad, neid pole nii lihtne pöörlema panna. Vaja on mõningaid parandusi. Iga mootoriga komplektis on plastikristid, kettad, kinnituskruvid. Mootorile ostetud kronsteinid. Kaasas ka kinnituskruvid, laager ja kettad. laadimiskontroller. See saab energiat päikesepaneelidelt ja edastab selle akule.
Alustame oma kätega töötamist elektroonilise täitmisega. Allpool on päikesepaneeli jälgimisskeem.  Elektriskeem, plaat, plaadi redigeerimisprogramm: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Elektriskeem, plaat, plaadi redigeerimisprogramm: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Ahel on väga lihtne ja kergesti korratav. See on paljudest tõestatud valikutest kõige edukam. Kuid isegi tema autor pidi pisut muutuma. Tuli muuta muutuv- ja püsitakistite väärtusi, projekteeriti trükkplaadi vooluring.
Alustuseks prindime jälgija trükkplaadi spetsiaalsele paberile. See on lasertriikimistehnoloogia. Paberil on läikiv välimus. Tagaküljel on see tavaline matt. Läikivale küljele peate printima laserprinteriga. Pärast kokkupuudet triikrauaga tuleb lasta sellel jahtuda ja paber tuleb kihilt kergesti lahti.

Enne ülekandmist tuleb tekstoliit rasvatustada. Parim on kasutada peent liivapaberit. Kinnitame mustri tahvlile ja triigime kuuma triikrauaga 2 minutit.
Nüüd peate jälgimisplaadi söövitama. Võib kasutada ammooniumpersulfaati. Müüakse raadiopoodides. Sama lahendust saab kasutada mitu korda. Enne kasutamist on soovitav vedelikku soojendada 45 kraadini. See kiirendab oluliselt söövitusprotsessi. 20 minuti pärast oli tahvel edukalt valmis. Nüüd peate tooner eemaldama. Jällegi kasutage liivapaberit või atsetooni.
Nüüd saate teha plaadile augu. Võite alustada osade jootmist.
Päikesejälgija südameks on operatiivvõimendi lm324n. Kaks transistori tüüp 41c, tüüp 42c. Üks keraamiline kondensaator 104. Arendustöö autor asendas paljud detailid smd tüüpiga. 5408 dioodi asemel kasutati nende smd tüüpi analooge. Peaasi on kasutada vähemalt 3 amprit. Üks takisti 15 kilooomi jaoks, 1 47 kilooomi jaoks. kaks fototakistit. 2 häälestustakistit 100 ja 10 kilooomile. Viimane vastutab fotosensori tundlikkuse eest.
 Heliostaat või muul viisil jälgija on seade päikese jälgimiseks, meie puhul päikesepaneelide pööramiseks nii, et need oleksid alati päikesega risti. Pole saladus, et just sel juhul annab päikesepaneel maksimaalse võimsuse. Ülaltoodud skeemil kasutab päikesejälgimisseade (heliostaat) impulsi juhtimist ja suudab ilma inimabita päikesepatarei parimale valgustusele orienteerida.
Heliostaat või muul viisil jälgija on seade päikese jälgimiseks, meie puhul päikesepaneelide pööramiseks nii, et need oleksid alati päikesega risti. Pole saladus, et just sel juhul annab päikesepaneel maksimaalse võimsuse. Ülaltoodud skeemil kasutab päikesejälgimisseade (heliostaat) impulsi juhtimist ja suudab ilma inimabita päikesepatarei parimale valgustusele orienteerida.
Heliostaadi ahel koosneb kellageneraatorist (DD1.1, DD1.2), kahest integreerivast vooluringist (VD1R2C2, VD2R3C3), samast arvust kujundajatest (DD1.3, DD1.4), digitaalsest komparaatorist (DD2), kahest inverterid (DD1. 5, DD1.6) ja transistorlüliti (VT1-VT6) elektrimootori M1 pöörlemissuuna jaoks, mis juhib platvormi pöörlemist, millele päikesepatarei on paigaldatud. Kui toide on sisse lülitatud, genereerib elementide DD1.1, DD1.2 generaator taktimpulsse, mis järgnevad umbes 300 Hz sagedusega. Kui seade on töös, võrreldakse inverterite DD1.3, DD1.4 ja integraallülituste VD1R2C2, VD2R3C3 genereeritud impulsside kestusi. Nende järsus varieerub sõltuvalt integratsiooni ajakonstandist, mis omakorda sõltub fotodioodide VD1 ja VD2 valgustusest (kondensaatorite C2 ja C3 laadimisvool on võrdeline nende valgustusega). Integreerimislülituste väljundite signaalid suunatakse tasemekujundajatesse DD1.3, DD1.4 ja seejärel DD2 mikroskeemi elementidele tehtud digitaalsesse komparaatorisse. Sõltuvalt komparaatorisse sisestatud impulsside kestuste suhtest ilmub elemendi DD2.3 (kontakt 11) või DD2.4 (kontakt 4) väljundisse madala taseme signaal. Fotodioodide võrdse valgustuse korral on kõrgetasemelised signaalid mõlemas komparaatori väljundis. Transistoride VT1 ja VT2 juhtimiseks on vaja muundureid DD1.5 ja DD1.6. Kõrge signaalitase esimese inverteri väljundis avab transistori VT1, teise väljundis - VT2. Nende transistoride koormused on võtmed võimsatel transistoridel VT3, VT6 ja VT4, VT5, mis lülitavad elektrimootori M1 toitepinget. R4C4R6 ja R5C5R7 ahelad siluvad pulsatsiooni juhttransistoride VT1 HVT2 alustes. Mootori pöörlemissuund muutub sõltuvalt toiteallika ühenduse polaarsusest. Digitaalne komparaator ei lase kõigil võtmetransistoridel korraga avaneda ja seega tagab süsteemi kõrge töökindluse.
Hommikul päikesetõusuga on fotodioodide VD1 ja VD2 valgustus erinev ning elektrimootor hakkab päikesepaneeli läänest itta keerama. Kujundajate impulsside kestuse erinevuse vähenedes väheneb tekkiva impulsi kestus ning päikesepatarei pöörlemiskiirus aeglustub järk-järgult, mis tagab selle täpse asukoha päikese käes. Seega saab impulssjuhtimisega mootori võlli pöörlemise päikesepatareiga otse platvormile edastada, ilma käigukasti kasutamata. Päeval hakkab päikesepaneeli platvorm pöörlema koos päikese liikumisega. Hämaruse saabudes on impulsside kestus digitaalse komparaatori sisendis sama ja süsteem lülitub ooterežiimi. Selles olekus ei ületa seadme tarbitav vool 1,2 mA (orientatsioonirežiimis sõltub see mootori võimsusest).
Kui konstruktsiooni täiendada sarnase skeemi järgi kokku pandud vertikaalse läbipaindeplokiga, on võimalik aku orientatsiooni mõlemas tasapinnas täielikult automatiseerida. Kui skeemil pole äkki ühtegi mikrolülitust näidatud, saab need asendada K564, K176 seeria mikroskeemidega (toitepingega 5 ... 12 V). Transistorid KT315A on vahetatavad mis tahes seeria KT201, KT315, KT342, KT3102 ja KT814A - mis tahes KT814, KT816, KT818 seeriaga, samuti germaaniumiga P213-P215, P217. Viimasel juhul tuleks transistoride VT3-VT6 emitterite ja aluste vahele ühendada takistid takistusega 1 ... 10 kOhm, et vältida nende juhuslikku avanemist olulise pöördvoolu tõttu. Fotodioodide FD256 asemel võite panna tükid päikesepatareidest (polaarsusega ühendatud), fototransistore ilma nihkeahelata, aga ka mis tahes modifikatsiooniga fototakisteid, näiteks SF2, SFZ või FSK. Vaja on ainult valida (takisti R1 takistust muutes) kella generaatori sagedus vastavalt digitaalse komparaatori usaldusväärsele tööle. Fotodioodide kaitsmiseks liigse kiirguse eest kasutatakse rohelist valgusfiltrit. Fotosensorite vahele asetatakse läbipaistmatu kardin. See on fikseeritud tahvliga risti nii, et valgustusnurga muutumisel varjab see ühe fotodioodi. 










