Mycket ofta installeras solpaneler styvt och permanent. Detta är enkelt, men inte särskilt effektivt, eftersom solen under dagen rör sig över himlen och mängden ljusenergi som tas emot av solpanelerna ändras. Den maximala avkastningen av solbatteriet är möjlig endast när ljuset faller på panelen vinkelrätt mot dess plan. För att solens strålar ska falla på solpanelen alltid vinkelrätt. solspårningssystem av olika design och olika komplexitetsnivåer används. Även om ett sådant system komplicerar installationen av solpaneler, låter det dig ta det maximala från dem. Solpaneler är fortfarande inte billiga, och vi, genom att investera i dem, vill verkligen förverkliga deras fulla potential.
Ofta kan de enklaste spårningssystemen bara rotera panelen i en axel. Sådana enheter inkluderar ett par fotosensorer och ett par komparatorer som styr en elmotor som ingår i diagonalen på den enklaste H-bryggan. Sådana enheter ökar naturligtvis också effektiviteten hos solpaneler, men de gör det inte särskilt effektivt, eftersom de bara fungerar inom en axel. Den här artikeln beskriver ett mycket enkelt solfångarsystem, som dock kan flytta panelen i två axlar, vilket ökar effektiviteten i solpanelen. Under drift försöker systemet kontinuerligt placera panelen så att dess plan alltid är vinkelrät mot det infallande solljuset och för att få maximal retur av elektricitet från batteriet. Spårningsenheten följer solen från gryning till solnedgångens sista strålar och återupptar automatiskt sitt arbete nästa morgon.
Enhetsdiagram innehåller LM339-chippet, som är fyra analoga komparatorer i ett gemensamt paket. Två motorer styrs av en specialiserad L293D-mikrokrets - en dubbel H-brygga. Förutom mikrokretsar innehåller kretsschemat flera diskreta element. Fotoresistorer LDR1 - LDR4 används som ljusintensitetssensorer Dessa fotoresistorer bestämmer solpanelens position i förhållande till solens strålar.
Fotoresistorblocket tillsammans med LM339-jämföraren genererar styrsignaler för L293D-motordrivrutinen. Fotoresistorer LDR1 och LDR2 är fixerade i hörnen av solpanelen på X-axeln, i LDR3 och LDR4 - på Y-axeln lågspänningsnivåer.
Tänk på algoritmen för arbetet system på exemplet med dess del som ansvarar för att röra sig längs X-axeln. Om fotoresistorn LDR2 tar emot mer ljus än LDR1, blir resistansen hos LDR2 mindre än resistansen för LDR1. En högre spänningsnivå visas vid ingångarna till komparatorerna A1 och A2 (4, 7). I detta fall uppträder en hög spänningsnivå vid utgången av komparator A2 (1). Motor M1 börjar rotera i en av riktningarna (säg moturs) och vrider solpanelen.
Om LDR1 tar emot mer ljus än LDR2, blir dess resistans mindre än resistansen för LDR2, vilket minskar spänningen vid komparatoringångarna (4, 7). Vid utgången (2) av komparator A2 uppträder en hög nivå och motorn börjar rotera i motsatt riktning (säg medurs). Spårning längs Y-axeln fungerar på exakt samma sätt.
Bilden nedan visar en möjlig design av ett solspårningssystem. Kretsen kan monteras på en enhetlig breadboard eller ett konventionellt kretskort kan dras för den.
Efter användningen av solpaneler för produktion av el i industriell skala började ingenjörer och designers leta efter sätt att öka effektiviteten hos sådana kraftverk. Den totala spridningen av solens ljus, som bestäms av förändringen i riktningen för solstrålarnas fall på fotocellerna, tillät inte effektiv användning av solpaneler under hela dagsljuset. En väg ut ur denna situation hittades ganska snabbt - solpaneler började installeras på en rörlig bas ansluten till ett solspårningssystem.
Som du vet, för att få maximal effekt från solpaneler, är det nödvändigt att solens strålar träffar batteriernas plan vinkelrätt. Med denna strålriktning kan solpanelernas effektivitet nå 50-55%. För permanent installerade batterier kan denna siffra reduceras till 10-15 % på grund av förändringar i solljusets infallsvinkel.
Solspårningsenheten består av två huvuddelar:
1. Kontrollschemat, som bestämmer solens position. Det enklaste diagrammet för en solspårningsenhet eller på annat sätt en tracker (Solar Tracker) visas nedan. För att bestämma solens position används två fotoresistorer. Schemat inkluderar:
- LM1458 operationsförstärkarchip (K140UD20);
- transistorer BD139 (KT815G, KT961A) och BD140 (KT814G, KT626V);
- fotoresistorer;
- dioder 1N4004 (KD243G);
- resistorer och avstämningsmotstånd.

2. Mekanismer för att vrida och luta batterier beroende på riktningen för solens strålar. Lutningsmekanismen tillåter användning av sådana spårningssystem på alla geografiska breddgrader: vid installation av solpaneler i ett område som motsvarar 320 nordlig latitud, måste enhetens axel vridas 320 i förhållande till horisonten. Drivningarna för alla mekanismer i spårningssystemet är byggda på basis av elektriska motorer, som påverkas av styrsystemet. Elmotorerna och styrsystemet drivs av själva solpanelerna, så sådana installationer är autonoma.
Som du kan se är schemat och enheten för solspåraren ganska enkla. Naturligtvis används mer komplexa system i industriell skala, men ett liknande system kan monteras oberoende för en hushållsinstallation för produktion av el baserad på solpaneler.

Nätverket innehåller ett stort antal färdiga system och lösningar för solspårningssystem. Så om det finns ett behov av att förbättra designen av solpaneler och öka deras prestanda, finns det alltid möjlighet att göra det själv.
En solspårare är ett elektroniskt-mekaniskt system utformat för att rikta solpaneler mot solen. Systemet spårar solens position på himlen och styr en servo som roterar panelerna i rätt riktning. Användningen av en sådan tracker låter dig få maximal prestanda från solpaneler.
De flesta hemmagjorda spårare som finns på Internet är monterade på Arduino, fotosensorer används för att bestämma solens position. Beroende på graden av belysning och den relativa positionen för fotosensorerna utförs en vridning i riktning mot maximal belysning. Denna metod har nackdelar: det är inte känt hur systemet kommer att bete sig i molnigt väder; låg brusimmunitet när det gäller svar på månsken och starka ljuskällor, såväl som på enskilda moln.
På grund av ovanstående nackdelar utvecklade jag min egen version av en ekonomisk servodriven solspårare som ger spårning av solen över hela den synliga himlen när som helst, oavsett geografisk plats.
Solens position på himlen kan bestämmas inte bara genom belysningen av fotosensorer, utan också av formlerna för himmelsmekanik baserat på de geografiska koordinaterna för observationspunkten och den exakta tiden. Nu kommer det att finnas många definitioner och formler relaterade till himmelsk mekanik, så gör dig redo att anstränga dina veck). För att peka solpanelerna måste du bestämma solens horisontella koordinater, detta är höjden och azimuten. Mitten av detta koordinatsystem sammanfaller med observatörens plats, beräkningarna utförs i förhållande till planet för den matematiska horisonten.
Höjden h är vinkeln mellan mattans plan. horisont och riktning till armaturen, räknat från 0⁰ till +90⁰ till zenit, och från 0⁰ till -90⁰ till nadir.
Azimuth A - vinkeln mellan middagslinjen (i grova drag, riktningen söderut) och skärningslinjen för mattplanet. horisont med planet för armaturens vertikala cirkel. Den räknas från sydpunkten i riktning mot den dagliga rotationen av himlaklotet inom 0⁰ ... 360⁰, eller från 0⁰ till +180⁰ västerut och från 0⁰ till −180⁰ österut. Stjärnans horisontella koordinater förändras ständigt på grund av jordens dagliga rotation.
Nedan är formlerna för att beräkna armaturens höjd och azimut:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ kostnad);
A = atan2 (cos
där δ är stjärnans deklination, t är stjärnans timvinkel, ϕ är observationspunktens latitud (0⁰…+90⁰ för norra halvklotet, 0⁰...-90⁰ för södra, 0⁰ är ekvatorn).
Dekryptering av funktionen atan2(y, x): 
Som du kan se, för att beräkna de horisontella koordinaterna, är det nödvändigt att beräkna stjärnans deklination och timvinkel. Dessa koordinater hänvisar till det första ekvatoriska koordinatsystemet, där huvudplanet är planet för den himmelska ekvatorn.
Deklination δ - vinkeln mellan planet för den himmelska ekvatorn och riktningen till ljuskällan, mäts från 0⁰ till +90⁰ mot nordpolen och från 0⁰ till -90⁰ mot sydpolen.
Timvinkeln t är den dihedriska vinkeln mellan planet för den himmelska meridianen och deklinationscirkeln för armaturen. Den räknas i riktning mot himmelsfärens dagliga rotation, väster om den övre punkten av himlakvatorn, inom 0⁰ ... 360⁰, eller från 00:00 till 24:00 (varje timme). Timvinkeln kan också mätas från 0⁰ till 180⁰ (från 00:00 till 12:00) västerut och från 0⁰ till −180⁰ (från 00:00 till -12:00) österut. Timvinkeln är lika med 0 i ögonblicket för stjärnans övre kulmination, för solen vid verklig middagstid (inte alltid samma tid när klockan visar 12:00 lokal tid).
Solens deklination ändras under hela året (ojämnt) från -23,43⁰ till +23,43⁰, på grund av jordens omloppsrörelse runt solen, och är inte relaterad till jordens dagliga rotation. För att bestämma solens deklination för alla dagar på året är det enklaste sättet från tabellen med genomsnittliga deklinationsvärden för en 4-årscykel. Tabellen kan laddas ner i slutet av artikeln.
Stjärnans timvinkel ändras under dagen (på grund av jordens dagliga rotation), den kan beräknas med den sanna soltiden:
t \u003d Ts.ist - 12:00 h, (-12:00 ... + 11:59),
där Ts.ist är sann soltid (00:00…23:59h).
Sann soltid kan beräknas genom att känna till lokal tid, tidszon och longitud för observationspunkten:
Ts.ist = Ts.av + EOT, eller Ts.ist = UTC + λ + EOT,
där Ts.av är medelsoltiden vid någon punkt på jorden (beror på punktens longitud), UTC är den universella koordinerade tiden, λ är longituden för observationspunkten i timenheter, EOT är tidsekvationen.
Koordinerad universell tid kan beräknas från lokal tid (Tm) och tidszon (N): UTC = Tm – N. Platslongitud λ mäts från 0⁰ till 180⁰ öster om nollmeridianen (östlig longitud), och från 0⁰ till -180⁰ åt väster (västlig longitud). Vid ersättning till formeln ovan måste longitud omvandlas till timenheter (1⁰ = 4 min).
EOT-tidsekvationen visar skillnaden mellan medelsoltid och sann soltid, eftersom solens dagliga rörelse är ojämn på grund av jordens banas ellipticitet, samt lutningen av jordens axel mot ekliptikplanet:
EOT = 9,87 ∙ sin2B - 7,53 ∙ cosB - 1,5 ∙ sinB,
där B = (360⁰ (N-81))/365, N är ordningsnumret för dagen på året.
Under året ändras alltså värdet på tidsekvationen från -14,3 minuter till +16,4 minuter.
Nedan är en graf över hur tidsekvationen förändras under loppet av ett år: 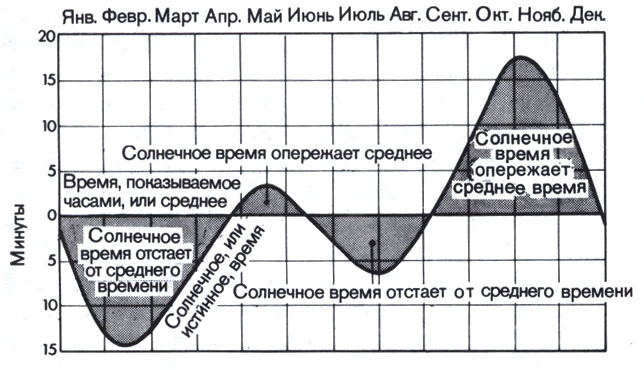
Jag var tvungen att köra in alla dessa beräkningar i mikrokontrollerprogrammet, jag vågade inte skriva i assembler, så jag började studera SI, jag fick pilla med formler och beräkningar i veckor för att få rätt resultat, studera SI på vägen. Som ett resultat lyckades jag skriva ett fungerande program, medan beräkningsfelet inte överstiger ±1⁰.
Solar tracker utformades för ett litet solbatteri med en effekt på 2W och en spänning på 6V för att ladda ett litiumjonbatteri, men det är bättre att använda ett kraftfullare batteri på minst 4W. Som elektriska enheter använde jag MG996R servon (du kan köpa i Kina, länken finns i slutet av artikeln). Dessutom köpte jag speciella fästen för montering av en alt-azimut installation (länk för beställning i slutet av artikeln). Den sammansatta designen gör att du kan orientera solbatteriet i höjd och azimut, medan azimutservot är stationärt och roterar höjdservot tillsammans med fästena.
Nedan är ett diagram över solspåraren: ![]()
Kretsen är baserad på mikrokontrollern PIC16F876A, som har en betydande mängd minne och innehåller många kringutrustningsmoduler. Hela strukturen drivs av ett Li-ion-batteri, som följaktligen laddas från ett solbatteri genom en modul baserad på TP4056-chippet, detta är en specialiserad laddningsregulator för Li-ion-batterier (beställningslänk i slutet av artikeln) . För att bestämma aktuell tid och datum använder schemat en modul (länk för beställning i slutet av artikeln). Klockan är ganska exakt, tidsdriften är ± 2 minuter per år, jag har redan skrivit en detaljerad artikel om dem, de som vill kan bekanta sig. För att visa parametrarna används en digital indikator på (länk för beställning i slutet av artikeln).
Maxspänningen på Li-ion-batteriet överstiger inte 4,1V, vilket inte räcker för att driva servon, så en step-up-modul baserad på MT3608-chippet har lagts till kretsen (beställningslänk i slutet av artikeln ). Modulens minsta inspänning är 2V, den maximala belastningsströmmen är 2A, modulen har ett variabelt flervarvsmotstånd för att justera utspänningen. För att spara energi tillförs inte strömmen till servon ständigt, utan endast för att ändra axelns läge. Effekten växlas med hjälp av en p-kanals fälteffekttransistor VT1, omvandlarmodulen styrs också från mikrokontrollern.
Modulkortet tillhandahåller ingen kontakt för kontroll, så det är nödvändigt att ytterligare löda tråden till det 4:e stiftet på MT3608-chippet, detta är omvandlarens på/av-ingång. På brädet är detta stift anslutet till "+" strömförsörjningen, först måste du skära av spåren som är lämpliga för detta stift (för detta måste du lossa mikrokretsen), eller höja stiftet ovanför kortet. Ett spänningsdelarresistorchip är installerat på modulkortet, vilket ökar motståndet för detta motstånd kommer också att minska förbrukningen i viloläge, jag ersatte det med ett annat, med ett motstånd på 9,1 kOhm, från början var det 2,2 kOhm. Efter byte måste du ställa in utspänningen till cirka 5-5,5V för att driva servon, bilden nedan: 
Klockmodulen behöver också förbättras, för att minska strömförbrukningen måste du löda 24c32-minneschippet, "POWER"-LED, såväl som motståndet (200 Ohm), genom vilket den externa matningsspänningen tillförs batteriet , varför kineserna gjorde detta förblir obegripligt, eftersom batteriet inte är avsett för laddning, se bilden nedan: 
Lysdioden HL1 är inställd för att indikera ett kommunikationsfel med DS3231-klockan (via I2C-gränssnittet), lysdioden börjar blinka om det inte finns något svar från klockan.
Monteringen av alt-azimut-inställningen bör startas när servon är inställda i mittläget, detta händer när enheten först slås på, indikatorn kommer att visa inskriptionen "Cent". Det är önskvärt att montera azimutservot på en platta som kommer att fungera som bas för installationen, eller på ett stativ, så att den utgående axeln är riktad vertikalt uppåt. Därefter måste du fästa höjdservofästet, först måste du skruva skjuthylsan på fästet, sedan adapterhylsan. Fästet måste ställas in vinkelrätt mot långsidan av azimutservot, som visas på bilden: 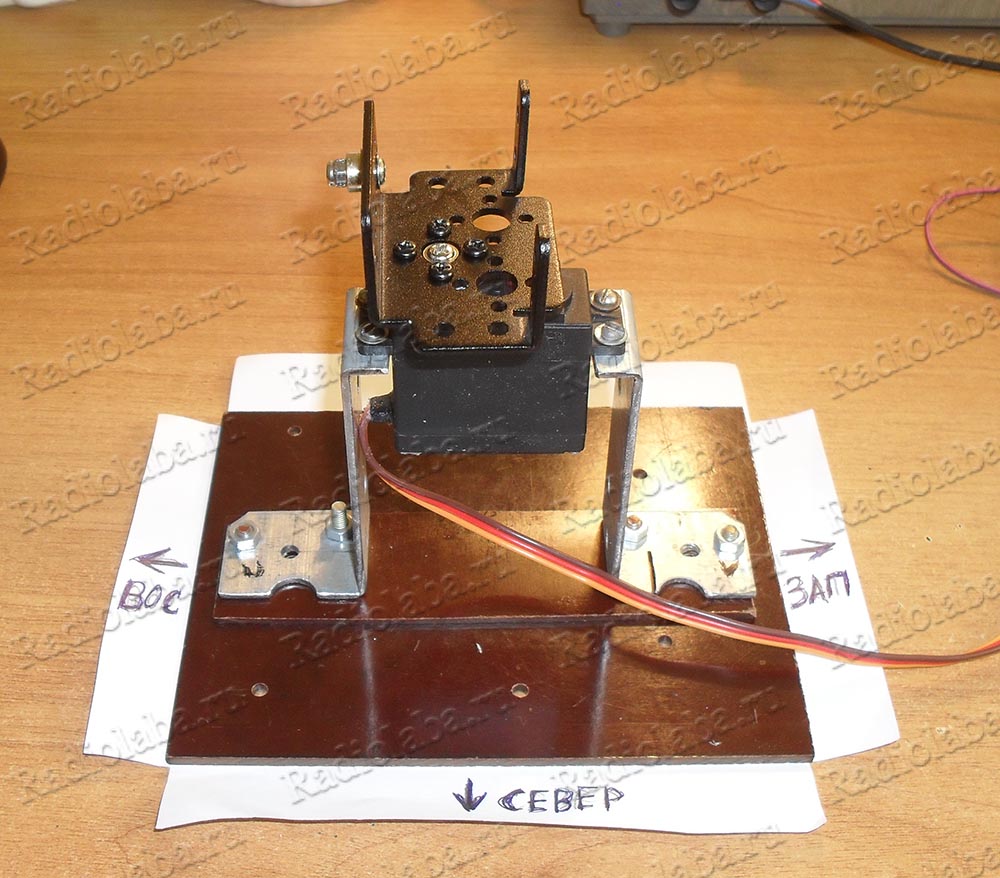
Vid montering är det svårt att uppnå en vinkelrät position, men detta är inte nödvändigt, avvikelser inom ± 5-10 grader är acceptabla. I framtiden kommer mjukvarujustering att eliminera denna avvikelse.
Efter fixering av höjdservot återstår att fästa bärfästet, prova först på adapterhylsan på servoaxeln, välj ett läge så att bärfästet efter montering är riktat vertikalt uppåt. Återigen är det inte nödvändigt att ställa in den exakta positionen, som jag sa tidigare. En allmän bild av installationen visas på följande bild: 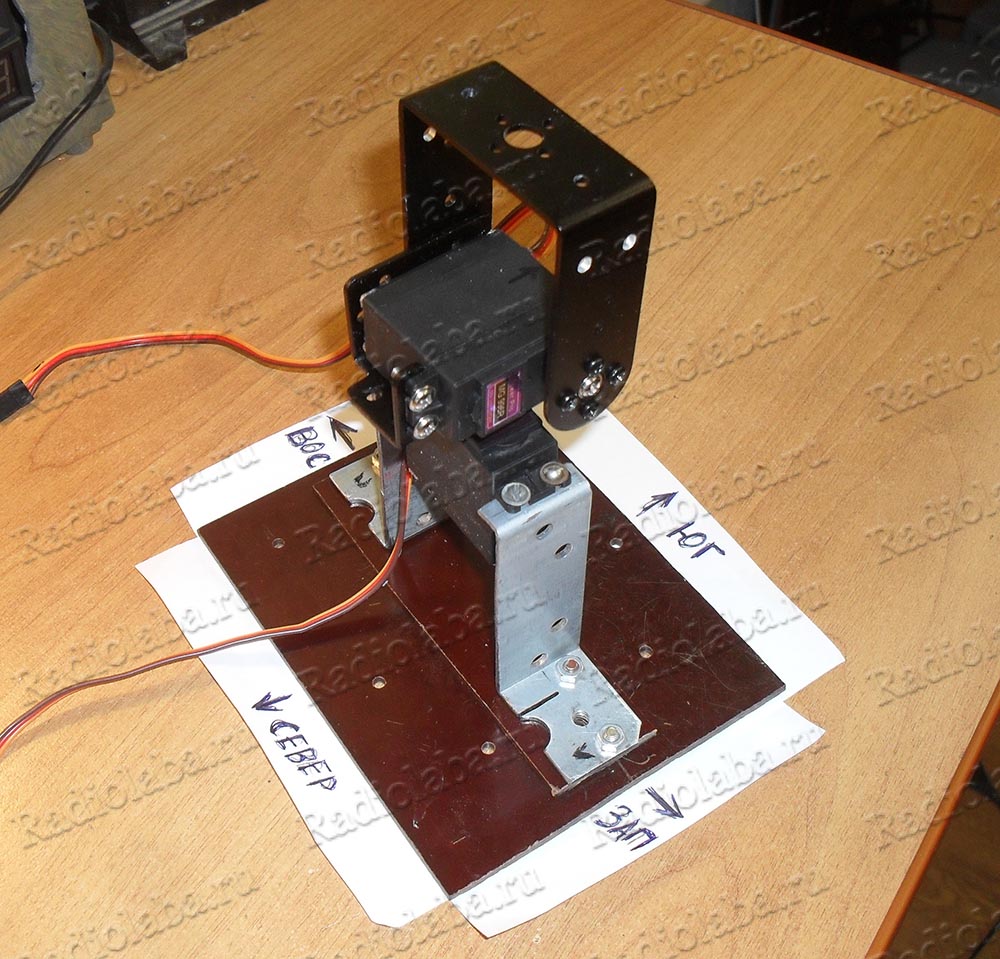
Följande är proceduren för att justera servons extrema positioner. Justering bör utföras på en plan yta, när servoaxeln är azimutalt vertikal (rotationsaxeln är riktad längs ett lod). Efter att ha tryckt på "Enter"-knappen, vänder den stödjande konsolen mot den villkorliga norr och tar en horisontell position (inskriptionen "norr" visas på indikatorn): 
Om det finns en avvikelse från det horisontella, måste du justera fästets position med knapparna "Set" och "Utladdning". Därmed justeras servons ytterläge. Vidare, när "Enter"-knappen trycks in, vänder konsolen mot den villkorliga södern (Syder skrivs på indikatorn). Justera vid behov fästets horisontella position enligt beskrivningen ovan.
Ytterligare tryck på "Enter"-knappen kommer att vrida armen mot den konventionella östern (på indikatorn finns en inskription EASt). Knapparna "Set" och "Utladdning" korrigerar riktningen, medan det är bekvämt att fokusera på azimutservodrivningens kropp, är det nödvändigt att fästet riktas längs kroppens långa sida, sett uppifrån: 
Nästa gång du trycker på "Enter"-knappen kommer konsolen att vända sig mot väster (indikatorn visar inskriptionen WESt), justeringen utförs enligt beskrivningen ovan.
Som ett resultat av korrigeringen roteras fästet i höjd och azimut inom 180⁰, korrigeringsvärdena lagras i mikrokontrollerns EEPROM-minne. Efter att ha tryckt på "Enter"-knappen kommer konsolen att ta den korrigerade riktningen till den villkorliga södern. För korrekt orientering av solbatteriet bör riktningen till den villkorliga södern indikera den verkliga punkten i söder i det givna området, och servodrivaxeln i azimut är placerad vertikalt längs en lodlinje.
Efter att ha tryckt på "Enter"-knappen igen ska tid, datum, tidszon, platskoordinater och varaktighet för viloläget ställas in. Följaktligen, för varje parameter, visas följande inskriptioner på indikatorn:
– lokal tid, som standard 0 h 0 min;
– plats longitud, som standard -0 grader. 0 min. (för västlig longitud sätts ett minustecken "-");
– platslatitud, som standard -0 grader. 0 min. (för den södra breddgraden sätts ett minustecken "-");
– tidszon, som standard -0, (för västlig longitud sätts ett minustecken "-");
– varaktighet för viloläge, standard 1 min.
Knapparna "Utladda" och "Ställ in" ställer in parametervärdena, när "Enter"-knappen trycks in skrivs tid- och datumvärdena till , resten av parametrarna lagras i mikrokontrollerns EEPROM-minne. Efter att ha angett alla parametrar visar indikatorn inskriptionen SUCCES (i 1 sekund, sedan slocknar indikatorn), sedan är installationen riktad mot solen, enligt de angivna parametrarna.
För att spara energi utförs siktning mot solen efter en viss tidsperiod, som ställs in i parametern Viloläges varaktighet. Efter att ha pekat är servon strömlösa, mikrokontrollern går in i viloläge, den totala förbrukningen av trackern reduceras till 160 μA. Varaktigheten av "sömn" kan ställas in inom 1-255 minuter.
När trackern slås på igen (efter att strömmen stängts av) kontrolleras först EEPROM-minnet, om de sparade parametrarna är korrekta fortsätter trackern att spåra solen, medan den digitala indikatorn förblir i viloläge och inte tänds till spara energi. Du kan i allmänhet stänga av strömmen till indikatorn efter den första inmatningen av parametrar. För att återgå till korrigeringsläget måste du hålla ned "Set"-knappen och slå på trackern. Om parametrarna som läses från EEPROM är felaktiga eller saknas, går den också in i korrigeringsläget.
Jag lade dessutom till funktionen att mata ut huvudparametrarna via UART-gränssnittet till mikrokontrollerprogrammet. Efter att ha beräknat solens position sänder mikrokontrollern det aktuella värdet av tid, datum, dagens serienummer, platskoordinater som angavs under installationen, såväl som de aktuella värdena för solens höjd och azimut. Varje parameter börjar med symbolen "$" och slutar med symbolerna "\r", "\n". Dessa data kan ses på en dator genom att ansluta trackern via en USB-UART-adapter. I terminalprogrammets inställningar måste du ställa in följande inställningar: överföringshastighet 9600 bps, 8 databitar, en stoppbit. Nedan är en skärmdump från terminalprogrammet: ![]()
MG996R servon är inte skyddade från fukt inuti höljet, så vid utomhusbruk måste servon förslutas. Ta bort de fyra bultarna från undersidan av höljet och applicera neutralt silikontätningsmedel mellan skarvarna i höljet, och applicera tätningsmedel runt manschetten för att komma in i trådarna i höljet. Du kan dessutom applicera fett på växellådans växlar, eftersom fabriken praktiskt taget saknas. Enligt recensioner är SHRUS-4-fettet bäst lämpat, till skillnad från lithol fryser det inte i kylan. För att täta det övre hålet kan en silikonring sättas på utgående axel, och avfasningen måste tas bort från adaptern, som är installerad på axeln, för att inte skapa överdriven friktion.
Jag fäste en rektangulär textolitplatta på det bärande fästet, på vilken jag limmade solbatteriet med dubbelhäftande tejp. Eftersom servon är strömlösa för det mesta är det möjligt att rotera axeln i höjdled under inverkan av solpanelens gravitation. För att undvika detta fäste jag långa motvikter gjorda av vinklar och plattor på sidorna av bärfästet. Genom att ändra massan på motvikterna balanserade jag strukturen längs höjdens rotationsaxel.
Spåraren utför vägledning när solen är ovanför horisonten, det vill säga när dess höjd är större än 0⁰. När solen går ner under horisonten (negativt höjdvärde) riktar spåraren solpanelen mot öster, och vidare spårning återupptas vid soluppgången. Spårning utförs över hela den synliga delen av himlen.
Solens och stjärnornas dagliga rörelser kan ses på en dator i programmet Stellarium, ett gratis virtuellt planetarium som visar en realistisk stjärnhimmel. Programmet visar armaturernas rörelse på himlen, du kan se solens och stjärnornas position när som helst, data om olika koordinater är också tillgängliga.
Jag monterade enheten på ett kretskort som jag designade för att passa GAINTA G1202G-fodralet. Brädan har en plats för en bygel (jumper), med vilken du kan stänga av strömmen till den digitala indikatorn.
Fälteffekttransistor VT1 kan ersättas med IRLML2244, IRLML6402. Du kan också använda transistorer i SOIC-8-paketet (du måste göra om kortet): IRF9332, IRF9310, IRF9317.
Vid negativa temperaturer tappar Li-ion-batterier betydande kapacitet (elektrolyt fryser), det rekommenderas inte att använda batterier vid temperaturer under +5 ⁰C, eftersom detta leder till för tidig minskning av resursen. Därför, om du planerar att använda trackern i frostigt väder, är det bättre att använda ett LiFePO4 litium-järn-fosfatbatteri. Batterier av denna typ är mer frostbeständiga, driftstemperaturområdet är från -30 ⁰C till +55 ⁰C, den maximala spänningen är 3,65V, minimum är 2V, genomsnittet är 3,3V, det vill säga lägre än för Li -Jon. Dessutom inkluderar fördelarna en stabil urladdningsspänning nära 3,2V. I slutet av artikeln finns länkar för att beställa ett batteri, samt en modul för laddning.
På basis av en solspårare kan du skapa ett litet autonomt system som inte kräver extern ström, till exempel en avlägsen väderstation, eller ett säkerhetssystem för ett sommarhus, etc. Du kan byta ut servon med mer kraftfulla, och installera en större solpanel. Det är möjligt att anpassa kretsen för solpaneler på 12, 18V, för att ladda flera seriekopplade batterier, men för detta måste du byta krets och använda andra laddningsmoduler.
Nedan finns länkar för att beställa moduler och komponenter för montering av en solar tracker:
Solbatteri 6V 4,5W
Realtidsklockmodul DS3231
Digital indikator på MAX7219 drivrutinen
Li-ion batteriladdningsmodul på TP4056
Batteri LiFePO4 6500mah
Batteri LiFePO4 1800mah
LiFePO4 batteriladdningsmodul
Servo MG996R
Fästen för montering av alt-azimut installation för MG996R servon
Boost-omvandlare på MT3608
![]()
![]()
![]()
![]()
![]()
![]()
Till att börja med är det nog värt att berätta vad den här artikeln betyder med en solspårare. Kort sagt är enheten ett flyttbart stativ för en solpanel, vilket är nödvändigt så att panelen på våra tempererade breddgrader samlar in en tillräcklig mängd ljus och ändrar sin position efter solen.
I det här fallet monterades prototypen av solar tracker på basis av Arduino. För att rotera plattformen i de horisontella och vertikala axlarna används servodrivenheter, vars rotationsvinkel beror på kraften hos ljuset som faller in på fotoresistorerna. Allas favorit sovjetiska metallkonstruktör används som kaross.
Det skulle vara användbart att nämna att allt detta gjordes som ett kursprojekt, så jag brydde mig inte om att köpa och montera själva solpanelen och batteriet, eftersom deras närvaro inte är relaterad till spårarens arbete. Som en ursäkt kan jag säga att möjligheterna för den sovjetiska metallkonstruktören är enorma, så att skruva fast en liten solpanel på den för att ladda telefonen blir inte svårt om en sådan önskan uppstår.
Så vad användes i monteringen:
Talaren, som plötsligt dök upp på listan, var skyldig att förstärka den högteknologiska effekten. Faktum är att servon bara kan rotera 180 grader, och vi behöver inte mer, med tanke på att vi följer solen. Men när man testade projektet, när man inte riktigt kan följa solen under två minuter av demonstrationen, visade det sig att det skulle vara trevligt att signalera vid vilken tidpunkt det är värt att sluta vifta med ficklampan, eftersom servon har nått de döda zon. För detta tillkom ovanstående uppmaning.
Så låt oss börja samla spåraren. Till att börja med, låt oss dela upp den kommande fronten av arbetet i villkorade fyra steg: montering av stativet för solpaneler och montering av servon, fästning av ljuskänsliga element på den monterade strukturen, lödning och skrivning av kod för Arduino.
Fotoresistorerna är ganska säkert fästa vid kroppen, det enda som skulle vara värt att arbeta med är noggrannheten i deras placering på plattformen: nu ser de inte upp tillräckligt vinkelrätt, vilket kan störa perfektionister och något förstöra rotationsnoggrannheten.
Lite kretsar: anslutningen av ljuskänsliga element utförs enligt spänningsdelarkretsen, för vilken de utgångsmotstånd som anges i listan över element krävdes. Alla fotoresistorer är lödda till ett gemensamt stift anslutet till Arduinos fem-volts uteffekt. För bekvämlighet och estetik är fotoresistorernas ben lödda till kontakterna på två isolerade ledningar med tre kärnor (en kontakt förblev oanvänd och dold). Alla kretsdetaljer kan ses i diagrammet nedan.




Koden
#omfatta

"Bang-bang"-kanalen visade hur man gör en hemmagjord solar tracker för paneler. De kommer automatiskt att rotera efter solen, vilket ökar kraftverkets effektivitet.
Du behöver två solpaneler med en kapacitet på 3,5 watt vardera. Vid utgången har man mer än 6 volt, vilket, när två batterier kopplas i serie, ger mer än 12 volt. USB-uttag på baksidan. Tre utgångar från tre batterisegment. Var och en genererar 2 volt. Det vill säga, om det behövs, kan du ansluta därefter och få 2, 4, 6 volt.

Nästa viktiga nod är två servon. Den ena kommer att rotera solpanelen horisontellt och den andra vertikalt. Dessa enheter är inte enkla, de är inte så lätta att få att rotera. Vissa förbättringar behövs. I setet med var och en av motorerna finns plastkors, skivor, skruvar för fastsättning. Fästen köpt till motorn. Även monteringsskruvar, lager och skivor ingår. laddningsregulator. Den kommer att ta emot energi från solpaneler och överföra den till batteriet.
Låt oss börja arbeta med våra egna händer med elektronisk fyllning. Trackerdiagrammet för solpanelen är nedan.  Kopplingsschema, kort, kortredigeringsprogram: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Kopplingsschema, kort, kortredigeringsprogram: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Kretsen är mycket enkel och lätt att upprepa. Det är det mest framgångsrika av flera beprövade alternativ. Men även hennes författare var tvungen att ändra sig lite. Jag var tvungen att ändra värdena för variabla och fasta motstånd, en kretskortskrets designades.
Till att börja med, låt oss skriva ut spårarens kretskort på specialpapper. Detta är laserstrykningsteknik. Papperet har ett glansigt utseende. På baksidan är det den vanliga matta. Du måste skriva ut på en laserskrivare på den blanka sidan. Efter kontakt med strykjärnet måste det få svalna och papperet lossnar lätt från lagret.

Innan överföringen måste textoliten avfettas. Det är bäst att använda fint sandpapper. Vi fäster mönstret på brädan och stryker det med ett varmt strykjärn i 2 minuter.
Nu måste du etsa spårarkortet. Ammoniumpersulfat kan användas. Säljes i radiobutiker. Samma lösning kan användas flera gånger. Det är önskvärt att värma vätskan till 45 grader före användning. Detta kommer att påskynda etsningsprocessen avsevärt. Efter 20 minuter färdigställdes tavlan framgångsrikt. Nu måste du ta bort tonern. Återigen, använd sandpapper eller aceton.
Nu kan du göra ett hål i brädan. Du kan börja löda delar.
Hjärtat i solspåraren är operationsförstärkaren lm324n. Två transistorer typ 41c, typ 42c. En keramisk kondensator 104. Författaren till utvecklingen ersatte många detaljer med smd-typen. Istället för 5408 dioder användes deras analoger av smd-typ. Det viktigaste är att använda minst 3 ampere. Ett motstånd för 15 kilo-ohm, 1 för 47 kilo-ohm. två fotomotstånd. 2 st avstämningsmotstånd för 100 och 10 kilo-ohm. Den senare är ansvarig för fotosensorns känslighet.
 En heliostat, eller på annat sätt, en tracker, är en anordning för att spåra solen, i vårt fall, för att vrida solpaneler så att de alltid är vinkelräta mot solen. Det är ingen hemlighet att det är i det här fallet som solpanelen ger maximal effekt. I diagrammet ovan använder solspårningsenheten (heliostaten) pulsstyrning och kan utan mänsklig hjälp orientera solpanelen till bästa belysning.
En heliostat, eller på annat sätt, en tracker, är en anordning för att spåra solen, i vårt fall, för att vrida solpaneler så att de alltid är vinkelräta mot solen. Det är ingen hemlighet att det är i det här fallet som solpanelen ger maximal effekt. I diagrammet ovan använder solspårningsenheten (heliostaten) pulsstyrning och kan utan mänsklig hjälp orientera solpanelen till bästa belysning.
Heliostatkretsen består av en klockgenerator (DD1.1, DD1.2), två integrerande kretsar (VD1R2C2, VD2R3C3), samma antal shapers (DD1.3, DD1.4), en digital komparator (DD2), två växelriktare (DD1. 5, DD1.6) och en transistoromkopplare (VT1-VT6) för rotationsriktningen för elmotorn M1, som styr rotationen av plattformen på vilken solbatteriet är installerat. Med strömmen på genererar generatorn på elementen DD1.1, DD1.2 klockpulser som följer med en frekvens på cirka 300 Hz. När enheten är i drift jämförs varaktigheterna för de pulser som genereras av växelriktarna DD1.3, DD1.4 och de integrerande kretsarna VD1R2C2, VD2R3C3. Deras branthet varierar beroende på integrationstidskonstanten, som i sin tur beror på belysningen av fotodioderna VD1 och VD2 (laddningsströmmen för kondensatorerna C2 och C3 är proportionell mot deras belysning). Signalerna från de integrerande kretsarnas utgångar matas till nivåformarna DD1.3, DD1.4 och sedan till en digital komparator gjord på elementen i DD2-mikrokretsen. Beroende på förhållandet mellan varaktigheterna för pulserna som matas in till komparatorn, uppträder en lågnivåsignal vid utgången av elementet DD2.3 (stift 11) eller DD2.4 (stift 4). Med lika belysning av fotodioderna finns högnivåsignaler vid båda utgångarna på komparatorn. Inverterarna DD1.5 och DD1.6 krävs för att styra transistorerna VT1 och VT2. En hög signalnivå vid utgången av den första växelriktaren öppnar transistorn VT1, vid utgången av den andra - VT2. Belastningarna för dessa transistorer är nycklar på kraftfulla transistorer VT3, VT6 och VT4, VT5, som växlar matningsspänningen för elmotorn M1. R4C4R6- och R5C5R7-kretsarna jämnar ut rippel vid basen av kontrolltransistorerna VT1 HVT2. Motorns rotationsriktning ändras beroende på polariteten hos anslutningen till strömkällan. Den digitala komparatorn tillåter inte alla nyckeltransistorer att öppna samtidigt, och säkerställer därmed hög tillförlitlighet hos systemet.
På morgonen med soluppgången kommer belysningen av fotodioderna VD1 och VD2 att vara annorlunda, och elmotorn kommer att börja vända solpanelen från väst till öst. När skillnaden i varaktigheten av formarnas pulser minskar, kommer varaktigheten av den resulterande pulsen att minska, och solbatteriets rotationshastighet kommer gradvis att sakta ner, vilket säkerställer dess exakta positionering i solen. Således, med pulsstyrning, kan rotationen av motoraxeln överföras direkt till plattformen med ett solbatteri, utan användning av en växellåda. Under dagen kommer solpanelsplattformen att rotera med solens rörelse. Med början av skymningen kommer varaktigheten av pulserna vid ingången till den digitala komparatorn att vara densamma, och systemet går in i standbyläge. I detta tillstånd överstiger inte strömmen som förbrukas av enheten 1,2 mA (i orienteringsläge beror det på motoreffekten).
Om designen kompletteras med ett vertikalt avböjningsblock monterat enligt ett liknande schema, är det möjligt att helt automatisera batteriets orientering i båda planen. Om det plötsligt inte fanns några mikrokretsar indikerade på diagrammet, kan de ersättas med mikrokretsar av K564, K176-serien (med en matningsspänning på 5 ... 12 V). Transistorer KT315A är utbytbara med någon av serierna KT201, KT315, KT342, KT3102 och KT814A - med någon av serierna KT814, KT816, KT818, såväl som germanium P213-P215, P217. I det senare fallet bör motstånd med ett motstånd på 1 ... 10 kOhm anslutas mellan emitterna och baserna på transistorerna VT3-VT6 för att förhindra att de öppnas av misstag på grund av en betydande backström. Istället för fotodioder FD256 kan du sätta bitar från solceller (anslutna med polaritet), fototransistorer utan förspänningskretsar, såväl som fotoresistorer, till exempel SF2, SFZ eller FSK av någon modifiering. Det är bara nödvändigt att välja (genom att ändra motståndet hos motståndet R1) klockgeneratorns frekvens enligt den digitala komparatorns tillförlitliga funktion. Ett grönt ljusfilter används för att skydda fotodioderna från överdriven bestrålning. En ogenomskinlig gardin placeras mellan fotosensorerna. Den är fixerad vinkelrätt mot tavlan på ett sådant sätt att när belysningsvinkeln ändras, skymmer den en av fotodioderna. 










