Дуже часто панелі сонячних батарей встановлюють жорстко та стаціонарно. Це просто, але не дуже ефективно, тому що протягом дня сонце переміщається по небу і кількість світлової енергії, яку сонячні панелі змінюють. Максимальна віддача сонячної батареї можлива лише коли світло падає на панель перпендикулярно до її площини. Для того щоб сонячні промені падали на сонячну батарею завжди перпендикулярно. використовуються системи стеження за сонцем різної конструкції та різного рівня складності. Така система хоч і ускладнює монтаж сонячних батарей, але дозволяє взяти від них максимум. Сонячні панелі все ще не дешеві, і ми, вкладаючи в них свої кошти, напевно хочемо реалізувати їхній потенціал.
Найчастіше найпростіші системи стеження можуть повертати панель лише з однієї осі. Такі пристрої мають у своєму складі пару фотодатчиків та пару компараторів, які управляють одним електродвигуном, включеним у діагональ найпростішого H-мосту. Такі пристрої, звичайно, теж підвищують ефективність роботи сонячних панелей, але роблять це не зовсім ефективно, тому що працюють тільки в межах однієї осі. У цій статті описується дуже проста система стеження за сонцем, яка вміє переміщати панель по двох осях, що підвищує ефективність роботи сонячної батареї. Під час роботи система безперервно намагається розташувати панель так, щоб її площина завжди була перпендикулярна сонячним променям, що падає, і отримати максимальну віддачу електроенергії від батареї. Пристрій стеження слідує за сонцем від світанку до останніх променів заходу сонця і автоматично відновлює свою роботу наступного ранку.
Схема пристроюмістить мікросхему LM339, яка являє собою чотири аналогові компаратори в загальному корпусі. Двома моторами управляє спеціалізована мікросхема L293D – здвоєний H-міст. Крім мікросхем принципова схема містить кілька дискретних елементів. Як датчики інтенсивності освітлення використовуються фоторезистори LDR1 - LDR4. Ці фоторезистори визначають положення сонячної панелі щодо променів сонця.
Блок фоторезисторів разом із компаратором LM339 формує сигнали керування для драйвера моторів L293D. Фоторезистори LDR1 і LDR2 закріплені в кутах сонячної панелі на осі Х, в LDR3 і LDR4 - на осі Y. Підстроювальні резистори служать для налаштування системи так, щоб двигуни зупинялися коли сонячні промені падають на панель перпендикулярно її площині, при цьому на виходах компаратор низькі рівні напруги.
Розглянемо алгоритм роботисистеми на прикладі її частини, що відповідає за переміщення по осі Х. Якщо фоторезистор LDR2 отримує більше світла ніж LDR1, опір LDR2 стає менше опору LDR1.На входах компараторів А1 і А2 (4, 7) з'являється більш високий рівень напруги. При цьому на виході компаратора А2(1) з'являється високий рівень напруги. Мотор М1 починає обертатися в одному з напрямків (скажімо проти годинникової стрілки), повертаючи сонячну панель.
Якщо LDR1 отримує світла більше ніж LDR2, то його опір стає меншим, ніж опір LDR2, тим самим зменшуючи напругу на входах компараторів (4, 7). На виході (2) компаратора А2 з'являється високий рівень і двигун починає обертатися в протилежному напрямку (скажімо, за годинниковою стрілкою). Так само працює стеження по осі Y.
На малюнку нижче показано можливу конструкцію системи стеження за сонцем. Схему можна зібрати на уніфікованій макетній платі чи розвести нею звичайну друковану плату.
Після початку використання сонячних батарей для виробництва електроенергії в промислових масштабах інженери та проектувальники почали шукати способи підвищення ефективності таких електростанцій. Загальна дисперсія світла Сонця, яка визначається зміною напряму падіння сонячних променів на фотоелементи, не дозволяла ефективно використовувати сонячні батареї протягом усього світлового дня. Вихід із такої ситуації було знайдено досить швидко – сонячні панелі стали встановлювати на рухомому підставі, підключеному до системи стеження Сонцем.
Як відомо, для отримання максимальної потужності від сонячних батарей необхідно, щоб сонячні промені попадали на площину батарей перпендикулярно. За такого напрямку променів ККД сонячних батарей може досягати 50-55%. Для стаціонарно встановлених батарей цей показник може знижуватися до 10-15% через зміну кута падіння сонячних променів.
Пристрій стеження рухом Сонця і двох основних частин:
1. Схема управління, яка визначає положення Сонця. Найпростіша схема пристрою стеження за сонцем чи інакше трекер (Solar Tracker) наведена нижче. Для визначення позиції Сонця використовуються два фоторезистори. До складу схеми входять:
- мікросхема операційного підсилювача LM1458 (К140УД20);
- транзистори BD139 (КТ815Г, КТ961А) та BD140 (КТ814Г, КТ626В);
- фоторезистори;
- діоди 1N4004 (КД243Г);
- резистори та підстроювальні резистори.

2. Механізми повороту та нахилу батарей залежно від напряму сонячних променів. Механізм нахилу дозволяє використовувати такі системи стеження у будь-яких географічних широтах: при встановленні сонячних батарей у місцевості, що відповідає 320 північної широти, вісь пристрою має бути повернена на 320 по відношенню до горизонту. Приводу всіх механізмів системи стеження будуються з урахуванням електродвигунів, куди впливає система управління. Живлення електродвигунів та системи керування здійснюється від самих сонячних батарей, тому такі установки автономні.
Як видно, схема та влаштування сонячного трекера досить прості. Природно, що у промислових масштабах використовують складніші системи, проте подібну схему можна зібрати самостійно для побутової установки з виробництва електроенергії з урахуванням сонячних батарей.

Мережа містить чимала кількість готових схем та рішень щодо систем стеження за Сонцем. Отже, якщо виникла потреба вдосконалити конструкцію сонячних батарей та підвищити їхню продуктивність, завжди є можливість зробити це самостійно.
Сонячний трекер є електронно-механічною системою, призначеною для наведення сонячних панелей на Сонце. Система відстежує положення Сонця на небосхилі, і керує сервоприводом, який повертає панелі у відповідному напрямку. Застосування такого трекера дозволяє отримати максимальну продуктивність від сонячних батарей.
Більшість саморобних трекерів, що зустрічаються в інтернеті, зібрані на Arduino, для визначення положення Сонця використовуються фотодатчики. Залежно від ступеня освітленості та взаємного розташування фотодатчиків виконується поворот у бік найбільшого освітлення. Такий спосіб має недоліки: невідомо як поведеться система в хмарну погоду; низька схибленість у плані реагування на місячне світло і яскраві джерела світла, а також на окремі хмари.
Через наявність перелічених вище недоліків, я розробив свій варіант економічного сонячного трекера на сервоприводах, що забезпечує стеження за Сонцем по всій видимій області неба в будь-який час, незалежно від географічного розташування.
Положення Сонця на небі можна визначити не лише за освітленістю фотодатчиків, а й за формулами небесної механіки, виходячи з географічних координат точки спостереження та точного часу. Зараз буде багато визначень і формул, що стосуються небесної механіки, так що приготуйтеся напружити звивини). Для наведення сонячних панелей потрібно визначити горизонтальні координати Сонця, це висота та азимут. Центр цієї системи координат збігається з місцезнаходженням спостерігача, розрахунки ведуться щодо площини математичного горизонту.
Висота h – це кут між площиною мат. горизонту та напрямком на світило, відраховується від 0⁰ до +90⁰ до зеніту, і від 0⁰ до -90⁰ до надира.
Азімут A – кут між полуденною лінією (грубо кажучи, напрямок на південь) та лінією перетину площини мат. горизонту з площиною вертикального кола світила. Відраховується від точки півдня у бік добового обертання небесної сфери в межах 0⁰…360⁰, або від 0⁰ до +180⁰ на захід і від 0⁰ до −180⁰ на схід. Горизонтальні координати світила постійно змінюються внаслідок добового обертання Землі.
Нижче наведені формули для обчислення висоти та азимуту світила:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ cost);
A = atan2 (cosδ ∙ sint , cosδ ∙ sinϕ ∙ cost – sinδ ∙ cosϕ),
де δ – відмінювання світила, t – годинний кут світила, ϕ – широта точки спостереження (0⁰…+90⁰ для північної півкулі, 0⁰…-90⁰ для південної, 0⁰ – екватор).
Розшифровка функції atan2(y, x): 
Як видно для розрахунку горизонтальних координат, необхідно обчислити відмінювання і кутовий годинник світила. Ці координати відносяться до першої системи екваторіальної координат, де основною площиною є площина небесного екватора.
Відмінювання δ – кут між площиною небесного екватора та напрямком на світило, відраховується від 0⁰ до +90⁰ у бік північного полюса, і від 0⁰ до -90⁰ у бік південного полюса.
Годинний кут t – двогранний кут між площиною небесного меридіана та колом відмінювання світила. Відраховується у бік добового обертання небесної сфери, на захід від верхньої точки небесного екватора, в межах 0⁰…360⁰, або від 00:00 до 24:00 (годинною мірою). Також годинний кут може вимірюватися в межах від 0⁰ до 180⁰ (від 00:00 до 12:00) на захід і від 0⁰ до −180⁰ (від 00:00 до -12:00) на схід. Часовий кут дорівнює 0 в момент верхньої кульмінації світила, для Сонця в справжній полудень (не завжди збігається з моментом часу, коли годинник показує 12:00 за місцевим часом).
Відмінювання Сонця змінюється протягом року (нерівномірно) від -23,43⁰ до +23, 43⁰, внаслідок орбітального руху Землі навколо Сонця, і не пов'язане з добовим обертанням Землі. Визначити відмінювання Сонця для будь-якого дня року, найпростіше з таблиці середніх значень відмінювання за 4-річний цикл. Таблицю можна завантажити наприкінці статті.
Часовий кут світила змінюється протягом доби (внаслідок добового обертання Землі), його можна обчислити, знаючи справжній сонячний час:
t = Tс.іст - 12:00 год, (-12:00 ... +11:59),
де Tс.іст - справжній сонячний час (00:00 ... 23:59ч).
Справжній сонячний час можна обчислити, знаючи місцевий час, часовий пояс та довготу точки спостереження:
Tс.іст = Tс.ср + EOT, або Tс.іст = UTC + λ + EOT,
де Tс.ср – середній сонячний час у певній точці Землі (залежить від довготи точки), UTC – всесвітнє координоване час, λ – довгота точки спостереження у годинникових одиницях, EOT – рівняння часу.
Світовий координований час можна обчислити з місцевого часу (Tм) та часового поясу (N): UTC = Tм – N. Довгота розташування λ відраховується від 0⁰ до 180⁰ на схід від нульового меридіана (східна довгота), і від 0⁰ до -180⁰ (Західна довгота). При підстановці у наведену вище формулу, довготу потрібно перевести в годинникові одиниці (1⁰ = 4 хв).
Рівняння часу EOT показує різницю між середнім сонячним часом та справжнім сонячним часом, оскільки добовий рух Сонця нерівномірний, внаслідок еліптичності орбіти Землі, а також нахилу земної осі до площини екліптики:
EOT = 9,87 ∙ sin2B – 7,53 ∙ cosB – 1,5 ∙ sinB,
де B = (360⁰ (N-81))/365, N – порядковий номер дня на рік.
Таким чином, протягом року значення рівняння часу змінюється від -14,3 хв до +16,4 хв.
Нижче наведено графік зміни рівняння часу протягом року: 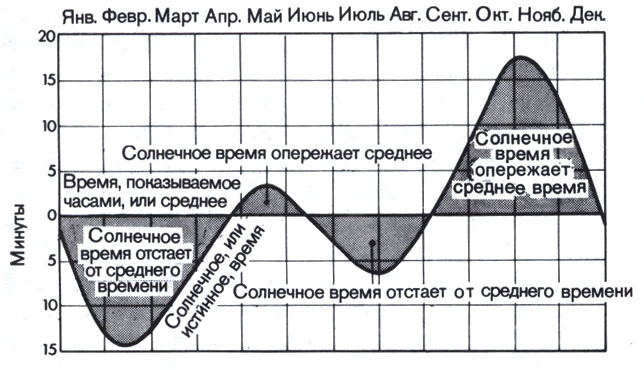
Мені потрібно було загнати всі ці розрахунки в програму мікроконтролера, я не ризикнув писати на асемблері, тому почав вивчати СІ, довелося тижнями возитися з формулами та розрахунками, для отримання правильного результату, попутно вивчаючи СІ. У результаті мені вдалося написати робочу програму, причому похибка обчислень не перевищує ±1⁰.
Сонячний трекер замислювався під невелику сонячну батарею потужністю 2Вт і напругою 6В для заряду літій-іонного акумулятора, але краще використовувати потужнішу батарею не менше 4Вт. Як електроприводи я використовував сервоприводи MG996R (купити можна в Китаї, посилання наведено в кінці статті). Додатково придбав спеціальні кронштейни для збирання альт-азимутальної установки (посилання для замовлення наприкінці статті). Зібрана конструкція дозволяє орієнтувати сонячну батарею за висотою та азимутом, сервопривід азимуту при цьому стоїть нерухомо і обертає сервопривід висоти разом з кронштейнами.
Нижче представлена схема сонячного трекера: ![]()
Схема побудована на мікроконтролері PIC16F876A, який має значний обсяг пам'яті, і містить безліч периферійних модулів. Вся конструкція живиться від Li-ion акумулятора, який відповідно заряджається від сонячної батареї через модуль на основі мікросхеми TP4056, це спеціалізований контролер заряду Li-ion акумуляторів (посилання для замовлення в кінці статті). Для визначення поточного часу та дати у схемі використовується модуль (посилання для замовлення в кінці статті). Годинник досить точний, догляд часу становить ±2 хвилини на рік, я вже писав докладну статтю про них, охочі можуть ознайомитися. Для відображення параметрів використовується цифровий індикатор (посилання для замовлення в кінці статті).
Максимальна напруга на Li-ion акумуляторі не перевищує 4,1В, що недостатньо для живлення сервоприводів, тому до схеми додано підвищує модуль на основі мікросхеми MT3608 (посилання для замовлення в кінці статті). Мінімальна вхідна напруга модуля 2В, максимальний струм навантаження 2А, на модулі є оборотний змінний резистор для налаштування вихідної напруги. Для економії енергії, харчування на сервоприводи подається не завжди, а лише зміни положення валу. Живлення комутується за допомогою p-канального польового транзистора VT1, модуль перетворювача також керується мікроконтролером.
На платі модуля не передбачено контакту для керування, тому необхідно додатково підпаяти провід до 4-го виводу мікросхеми MT3608, це вхід вкл/викл перетворювача. На платі цей висновок підключений до "+" живлення, попередньо потрібно обрізати доріжки, що підходять до цього висновку (для цього доведеться випаяти мікросхему), або підняти висновок над платою. На платі модуля встановлено чіп резистор дільника напруги, збільшення опору цього резистора також зменшить споживання в режимі сну, я замінив його на інший, з опором 9,1 кОм, спочатку стояв на 2,2 кОм. Після заміни потрібно виставити вихідну напругу приблизно на 5-5,5В для живлення сервоприводів, малюнок нижче: 
Модуль годинника також необхідно доопрацювати, для зниження енергоспоживання потрібно випаяти мікросхему пам'яті 24c32, світлодіод “POWER”, а також резистор (200 Ом), через який зовнішнє напруження живлення подається на батарейку, навіщо китайці так зробили, залишається незрозумілим, адже батарейка не призначена для заряду, див. малюнок нижче: 
Світлодіод HL1 встановлений для індикації помилки зв'язку з годинником DS3231 (за інтерфейсом I2C), світлодіод починає блимати, якщо немає відповіді від годинника.
Складання альт-азимутальної установки слід починати, коли сервоприводи встановлені в середнє положення, це відбувається при першому включенні пристрою, на індикаторі при цьому висвічується напис "Cent". Сервопривід азимуту бажано закріпити на пластині, яка буде основою установки, або на стійці, щоб вихідний вал був направлений вертикально вгору. Далі необхідно прикріпити кронштейн висоти сервоприводу, спочатку потрібно прикрутити до кронштейна втулку ковзання, потім перехідну муфту. Кронштейн потрібно виставити перпендикулярно довгій стороні сервоприводу азимуту, як показано на фото: 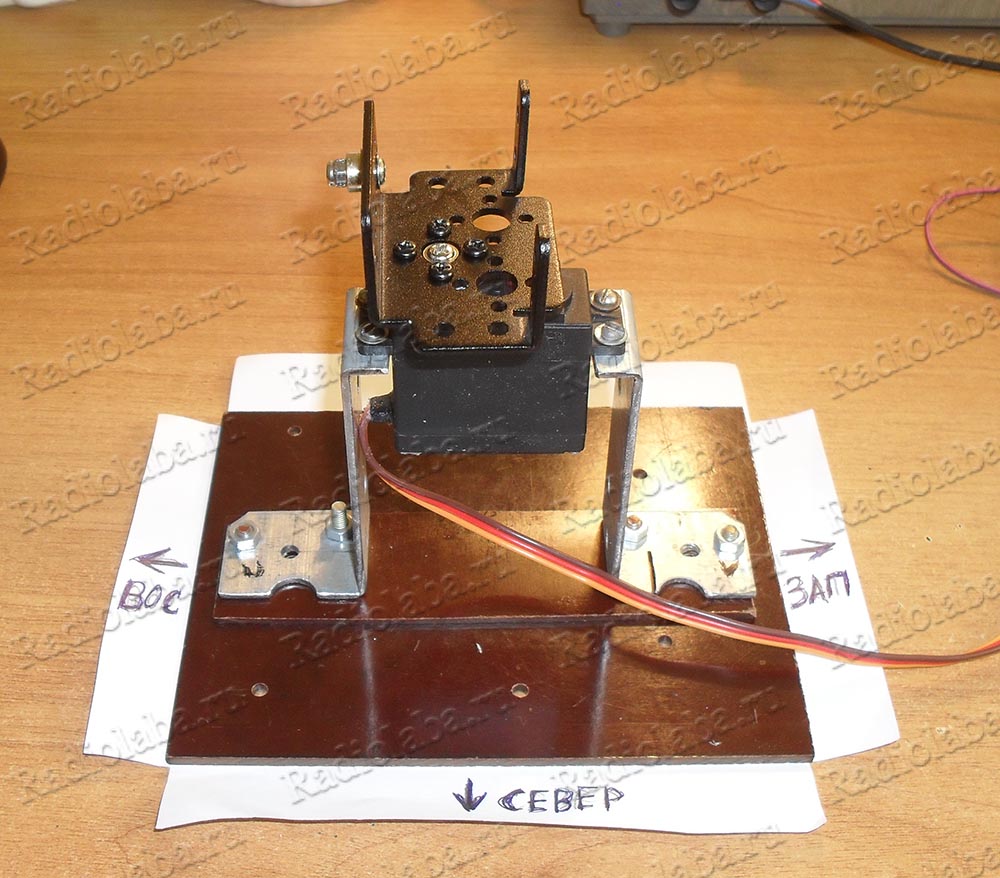
При складанні важко досягти перпендикулярного положення, але це не обов'язково, допустимі відхилення в межах ±5-10 градусів. Надалі програмне коригування усуне це відхилення.
Після закріплення сервоприводу висоти залишається прикрутити кронштейн, що несе, спочатку приміряємо перехідну муфту на вал сервоприводу, вибираємо таке положення, щоб несучий кронштейн після установки був направлений вертикально вгору. Знову ж таки не обов'язково виставляти точне положення, як я вже говорив раніше. Загальний вид установки представлений на наступному фото: 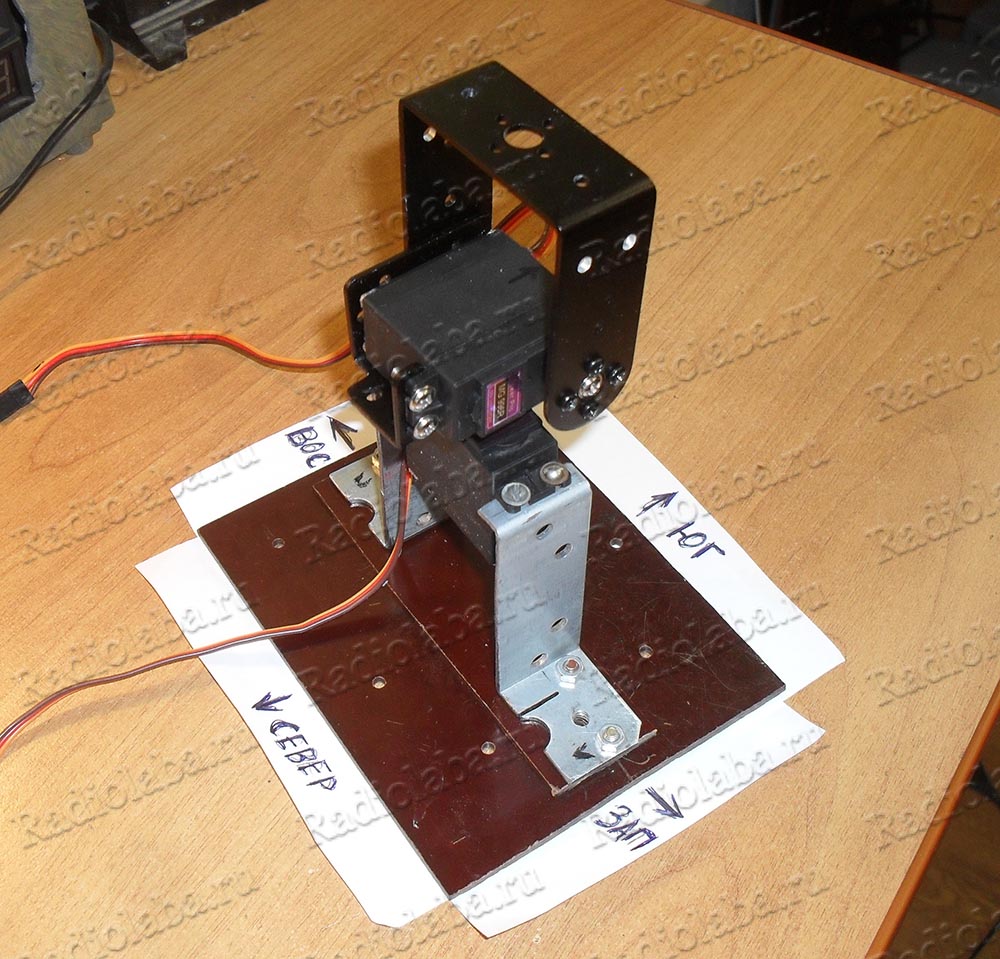
Далі слідує процедура коригування крайніх положень сервоприводів. Налаштування слід виконувати на рівній поверхні, коли вал сервоприводу по азимуту розташований вертикально (вісь обертання спрямована по прямовисній лінії). Після натискання кнопки “Введення” кронштейн, що несе, повертається у бік умовної Півночі і приймає горизонтальне положення (на індикаторі висвічується напис “north”): 
Якщо є відхилення від горизонталі, потрібно підрегулювати положення кронштейна кнопками “Уст” і “Разряд”. Таким чином відбувається налаштування крайнього положення сервоприводу. Далі при натисканні кнопки “Введення” кронштейн повертається у бік умовного Півдня (на індикаторі напис South). При необхідності налаштуйте горизонтальне положення кронштейна, як описано вище.
Подальше натискання кнопки “Введення” призведе до повороту кронштейна у бік умовного Сходу (на індикаторі напис EASt). Кнопками "Уст" і "Розряд" коригують напрямок, при цьому зручно орієнтуватися на корпус сервоприводу азимуту, щоб кронштейн був направлений по довгій стороні корпусу, якщо дивитися зверху: 
При наступному натисканні кнопки “Введення” кронштейн повернеться у бік Заходу (на індикаторі напис WESt), коригування виконується вищеописаним способом.
В результаті коригування, поворот кронштейна по висоті та азимуту виконується в межах 180⁰, значення коригування зберігаються в EEPROM пам'яті мікроконтролера. Після натискання кнопки "Введення", кронштейн прийме скоригований напрямок на умовний Південь. Для правильної орієнтації сонячної батареї напрям на умовний Південь повинен вказувати на реальну точку Півдня в даній місцевості, а вал сервоприводу по азимуту розташований вертикально по прямовисній лінії.
Після чергового натискання кнопки “Введення”, слід налаштувати час, дату, часовий пояс, координати розташування, тривалість сплячого режиму. Відповідно для кожного параметра на індикаторі висвічуються такі написи:
– місцевий час за замовчуванням 0 год. 0 хв;
- Довгота розташування, за замовчуванням -0 град. 0 хв. (Для західної довготи ставиться знак мінус "-");
– широта розташування за замовчуванням -0 град. 0 хв. (Для південної широти ставиться знак мінус "-");
- Часовий пояс, за умовчанням -0, (для західної довготи ставиться знак мінус "-");
– тривалість режиму сну, за замовчуванням 1 хв.
Кнопками "Розряд" та "Уст" виставляють значення параметрів, при натисканні кнопки "Введення", значення часу, і дати записуються в , інші параметри зберігаються в EEPROM пам'яті мікроконтролера. Після введення всіх параметрів на індикаторі висвічується напис SUCCES (протягом 1 сек, потім індикатор гасне), далі установка наводиться на Сонце, згідно з введеними параметрами.
Для економії енергії наведення на Сонце виконується через певний проміжок часу, який задається в параметрі тривалість сплячого режиму. Після наведення сервоприводи знеструмлюються, мікроконтролер переходить у сплячий режим, загальне споживання трекера знижується до 160 мкА. Тривалість сну можна задати в межах 1-255 хв.
При повторному увімкненні трекера (після відключення живлення) спочатку перевіряється EEPROM пам'ять, якщо збережені параметри коректні, трекер продовжує стеження за Сонцем, при цьому цифровий індикатор залишається в сплячому режимі і не вмикається, для економії енергії. Можна взагалі відключити живлення індикатора після введення параметрів. Для повторного входу в режим коригування потрібно утримувати кнопку “Уст” і подати живлення на трекер. Якщо параметри, зчитані з EEPROM, неправильні або відсутні, також буде перехід у режим коригування.
Я додатково додав до програми мікроконтролера функцію виведення основних параметрів за інтерфейсом UART. Після обчислення розташування Сонця мікроконтролер передає поточне значення часу, дати, порядковий номер дня, координати розташування, введені при налаштуванні, а також поточні значення висоти та азимуту Сонця. Кожен параметр починається з символу $ і закінчується символами \r, \n. Ці дані можна переглянути на комп'ютері, підключивши трекер через USB-UART перехідник. У налаштуваннях термінальної програми потрібно встановити такі налаштування: швидкість передачі 9600 біт/сек, 8 біт даних, один стоповий біт. Нижче представлений скріншот з термінальної програми: ![]()
Сервоприводи MG996R не захищені від попадання вологи всередину корпусу, тому у разі зовнішнього застосування сервоприводи слід загерметизувати. Потрібно відвернути чотири болта з нижньої сторони корпусу, і нанести нейтральний силіконовий герметик між стиками корпусу, також слід нанести герметик навколо манжети для введення проводів у корпус. На шестірні редуктора можна додатково нанести мастило, оскільки заводська практично відсутня. За відгуками, найкраще підходить мастило ШРУС-4, на відміну від літолу, воно не замерзає на холоді. Для герметизації верхнього отвору на вихідний вал можна надіти силіконове кільце, при цьому потрібно зняти фаску з перехідної муфти, яка встановлюється на вал, щоб не створювати надмірного тертя.
До кронштейна, що несе, я прикріпив прямокутну текстолітову пластину, на яку за допомогою двостороннього скотчу приклеїв сонячну батарею. Оскільки більшість часу сервоприводи знеструмлені, то можливий поворот валу по висоті під впливом тяжкості сонячної батареї. Щоб уникнути цього, я прикріпив з обох боків несучого кронштейна довгі противаги, виготовлені з куточків і пластин. Змінюючи масу противаг, я збалансував конструкцію по осі обертання висоти.
Трекер виконує наведення, коли Сонце знаходиться над горизонтом, тобто коли його висота більша за 0⁰. Коли Сонце заходить за обрій (негативне значення висоти), трекер спрямовує сонячну батарею на Схід, подальше стеження відновлюється зі сходом Сонця. Спостереження виконується по всій видимій області неба.
Добовий рух Сонця та зірок можна подивитися на комп'ютері в програмі Stellarium, це вільний віртуальний планетарій, який відображає реалістичне зоряне небо. Програма відображає рух світил по небосхилу, можна переглянути положення Сонця та зірок на будь-який момент часу, також доступні дані про всілякі координати.
Я змонтував пристрій на платі, яку розробив під розміри корпусу GAINTA G1202G. На платі є місце під джампер (перемичку), за допомогою якого можна відключати живлення цифрового індикатора.
Польовий транзистор VT1 можна замінити IRLML2244, IRLML6402. Також можна використовувати транзистори в корпусі SOIC-8 (доведеться переробити плату): IRF9332, IRF9310, IRF9317.
За негативних температур Li-ion акумулятори втрачають значну ємність (відбувається замерзання електроліту), використовувати акумулятори при температурах нижче +5 ⁰C не рекомендується, оскільки це призводить до передчасного скорочення ресурсу. Тому якщо планується експлуатувати трекер у морозну погоду, то краще використовувати літій-залізно-фосфатний акумулятор LiFePO4. Акмулятори такого типу більш морозостійкі, діапазон робочих температур від -30 ⁰C до +55 ⁰C, максимальна напруга 3,65В, мінімальна 2В, середня 3,3В, тобто нижча ніж у Li-ion. Також до переваг можна віднести стабільну напругу розряду, близьку до 3,2В. Наприкінці статті наведено посилання на замовлення акумулятора, а також на модуль для заряду.
На основі сонячного трекера можна створити невелику автономну систему, яка не вимагає зовнішнього живлення, наприклад, віддалена метеостанція, або охоронна система для дачі, і т.д. Можна замінити сервоприводи більш потужними, і встановити більшу сонячну панель. Можна пристосувати схему для сонячних панелей на 12, 18В, для заряду кількох послідовно з'єднаних акумуляторів, але для цього доведеться змінити схему і використовувати інші модулі заряду.
Нижче наведено посилання для замовлення модулів та комплектуючих для збирання сонячного трекера:
Сонячна батарея 6В 4,5Вт
Модуль годинника реального часу DS3231
Цифровий індикатор на драйвері MAX7219
Модуль заряду Li-ion акумулятора на TP4056
Акумулятор LiFePO4 6500mah
Акумулятор LiFePO4 1800mah
Модуль заряду LiFePO4 акумулятора
Сервопривід MG996R
Кронштейни для складання альт-азимутальної установки під сервоприводи MG996R
Підвищуючий перетворювач на MT3608
![]()
![]()
![]()
![]()
![]()
![]()
Для початку, мабуть, варто розповісти, що у цій статті розуміється під сонячним трекером. Коротко кажучи, пристрій є рухомою підставкою під сонячну панель, потрібну, щоб в умовах наших помірних широт панель збирала достатню кількість світла, змінюючи своє положення слідом за сонцем.
У разі прототип сонячного трекера збирався з урахуванням Arduino. Для обертання платформи горизонтальної і вертикальної осі використовуються сервоприводи, кут повороту яких залежить від потужності падаючого на фоторезистори світла. Як корпус використовується всіма улюблений радянський металевий конструктор.
Не зайвим буде згадати, що все це робилося як курсовий проект, тому я не став займатися придбанням та кріпленням власне, самої сонячної панелі та акумулятора, оскільки їхня наявність не має відношення до роботи трекера. На виправдання можу сказати, що можливості радянського металевого конструктора неосяжні, так що прикрутити до нього невелику сонячну панель для зарядки телефону не складе особливих труднощів, якщо виникне таке бажання.
Отже, що використовувалося при складанні:
Спікер, що раптово опинився в списку, знадобився для кращого ефекту високотехнологічності. Справа в тому, що сервоприводи можуть повертатися тільки на 180 градусів, та більшого нам і не потрібно, враховуючи те, що стежимо ми за сонцем. Але при тестуванні роботи проекту, коли за сонцем у дві хвилини демонстрації особливо не стежиш, виявилося, що непогано було б сигналізувати, коли варто перестати розмахувати ліхтариком, тому що сервопривід досяг мертвої зони. Для цього і було додано вищезгаданий дзвінок.
Отже, почнемо збирати трекер. Для початку розділимо майбутній фронт робіт на умовні чотири етапи: складання підставки для сонячних панелей та кріплення сервоприводів, кріплення до зібраної конструкції світлочутливих елементів, паяння та написання коду для Arduino.
Фоторезистори до корпусу прикріплені цілком надійно, єдине, з чим варто попрацювати - це з акуратністю їх розташування на платформі: зараз вони дивляться вгору недостатньо перпендикулярно, що може засмучувати перфекціоністів і злегка псувати точність повороту.
Небагато схемотехніки: підключення світлочутливих елементів здійснюється за схемою дільника напруги, для чого знадобилися вказані у списку елементів вивідні резистори. Усі фоторезистори припаяні до спільного контакту, підключеного до п'ятивольтного виходу живлення Arduino. Для зручності та естетики ноги фоторезисторів припаяні до контактів двох трижильних ізольованих проводів (один контакт залишився невикористаним та захований). Усі схемотехнічні деталі можна розглянути нижче.




Код
#include

Канал "тяп-ляп" показав, як зробити саморобний сонячний трекер для панелей. Вони будуть автоматично повертатися за сонцем, збільшуючи ККД енергетичної установки.
Знадобляться дві сонячні батареї потужністю по 3,5 Вт. На виході у однієї більше 6 вольт, що при послідовному з'єднанні двох батарей дасть більше 12 вольт. На звороті USB гніздо. Три виходи із трьох сегментів батареї. Кожен з яких генерують по 2 вольти. Тобто при необхідності можна підключитися відповідним чином та отримати 2, 4, 6 вольт.

Наступний важливий вузол – два сервоприводи. Один повертатиме сонячну батарею по горизонтальній осі, а інший по вертикальній. Ці приводи непрості, їх не так просто змусити обертатися. Необхідне деяке доопрацювання. У наборі з кожним двигуном йдуть пластикові хрестовини, диски, гвинти для кріплення. Для двигуна придбані кронштейни. Також у наборі кріпильні гвинти, підшипник та диски. Контролер заряду. Він прийматиме енергію від сонячних батарей і передаватиме її в акумулятор.
Почнемо роботу своїми руками з електронної начинки. Схема трекера на сонячній панелі нижче.  Електрична схема, плата, програма для редагування плати: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Електрична схема, плата, програма для редагування плати: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Схема дуже проста та легка для повторення. Вона найбільш вдала з кількох перевірених варіантів. Але навіть їй автору довелося трохи змінити. Довелося змінити номінали змінних та постійних резисторів, було спроектовано схему друкованої плати.
Спочатку роздрукуємо схему друкованої плати трекера на спеціальному папері. Це лазерно-прасна технологія. Папір має глянсовий вигляд. На звороті вона звичайна матова. Друкувати потрібно на лазерному принтері на глянцевому боці. Після контакту з праскою треба дати охолонути і папір легко відривається від шару.

Перед перенесенням текстоліт обов'язково потрібно знежирити. Найкраще використовувати дрібний наждачний папір. Прикладаємо малюнок до плати та прогладжуємо гарячою праскою 2 хвилини.
Тепер потрібно витравити плату трекера. Можна використовувати персульфат амонію. Продається у магазинах радіотоварів. Один і той самий розчин можна використовувати кілька разів. Бажано перед застосуванням підігрів рідини до 45 градусів. Це дуже прискорить процес травлення. За 20 хвилин правління успішно завершилося. Тепер потрібно зняти тонер. Знову використовуємо наждачку або ацетон.
Тепер можна зробити отвір у платі. Можна приступати до паяння деталей.
Серце сонячного трекера – операційний підсилювач lm324n. Два транзистори типу 41c типу 42c. Один керамічний конденсатор 104. Чимало деталей автор розробки замінив на smd тип. Замість діодів 5408 використані їх аналоги smd типу. Головне використовувати щонайменше 3 ампер. Один резистор на 15 кілом, 1 на 47 кілом. Два фоторезистори. 2 підстроювальних резисторів на 100 і 10 кілоом. Останній відповідає за чутливість фото датчика.
 Геліостат, або інакше, трекер - це такий пристрій для стеження за сонцем, у нашому випадку для повороту сонячних панелей, щоб вони завжди були перпендикулярні сонцю. Адже не секрет, що саме у такому разі сонячна панель віддає максимальну потужність. На схемі вгорі пристрій для стеження за сонцем (геліостат) використовує імпульсне регулювання і без будь-якої допомоги людини здатне орієнтувати сонячну батарею за найкращою освітленістю.
Геліостат, або інакше, трекер - це такий пристрій для стеження за сонцем, у нашому випадку для повороту сонячних панелей, щоб вони завжди були перпендикулярні сонцю. Адже не секрет, що саме у такому разі сонячна панель віддає максимальну потужність. На схемі вгорі пристрій для стеження за сонцем (геліостат) використовує імпульсне регулювання і без будь-якої допомоги людини здатне орієнтувати сонячну батарею за найкращою освітленістю.
Схема геліостата складається з тактового генератора (DD1.1, DD1.2), двох інтегруючих ланцюгів (VD1R2C2, VD2R3C3), такого ж числа формувачів (DD1.3, DD1.4), цифрового компаратора (DD2), двох інверторів (DD1). 5, DD1.6) і транзисторного комутатора (VT1-VT6) напрямки обертання електродвигуна М1, що управляє поворотом платформи, на якій встановлена сонячна батарея. З надходженням живлення генератор на елементах DD1.1, DD1.2 виробляє тактові імпульси, що йдуть із частотою близько 300 Гц. При роботі пристрою порівнюються тривалості імпульсів, сформованих інверторами DD1.3, DD1.4 та інтегруючими ланцюгами VD1R2C2, VD2R3C3. Їхня крутість змінюється в залежності від постійного часу інтегрування, яка, у свою чергу, залежить від освітленості фотодіодів VD1 і VD2 (струм зарядки конденсаторів С2 і СЗ пропорційний їх освітленості). Сигнали з виходів інтегруючих ланцюгів надходять на формувачі рівня DD1.3, DD1.4 і далі - цифровий компаратор, виконаний на елементах мікросхеми DD2. Залежно від співвідношення тривалостей імпульсів, що надходять на входи компаратора, сигнал низького рівня з'являється на виході DD2.3 елемента (висновок 11) або DD2.4 (висновок 4). При рівній освітленості фотодіодів на обох виходах компаратора є сигнали високого рівня. Інвертори DD1.5 і DD1.6 необхідні управління транзисторами VT1 і VT2. Високий рівень сигналу на виході першого інвертора відкриває транзистор VT1 на виході другого - VT2. Навантаженнями цих транзисторів є ключі на потужних транзисторах VT3, VT6 та VT4, VT5, які комутують напругу живлення електродвигуна М1. Ланцюги R4C4R6 та R5C5R7 згладжують пульсації на базах керуючих транзисторів VT1 HVT2. Напрямок обертання двигуна змінюється залежно від полярності підключення до джерела живлення. Цифровий компаратор не дозволяє одночасно відкритися всім ключовим транзисторам, і таким чином забезпечує високу надійність системи.
Вранці зі сходом сонця освітленість фотодіодів VD1 та VD2 виявиться різною, і електродвигун почне повертати сонячну батарею із заходу на схід. У міру зменшення різниці в тривалості імпульсів формувачів буде зменшуватися тривалість результуючого імпульсу, і швидкість повороту сонячної батареї плавно сповільнюватиметься, що забезпечить її точне позиціонування на сонці. Таким чином, при імпульсному керуванні обертання валу електродвигуна можна передавати платформі із сонячною батареєю безпосередньо, без застосування редуктора. Протягом дня платформа із сонячною панеллю повертатиметься за рухом сонця. З настанням сутінків тривалості імпульсів на вході цифрового компаратора виявляться однаковими і система перейде в черговий режим. У цьому стані струм, що споживається пристроєм, не перевищує 1,2 мА (в режимі орієнтації він залежить від потужності двигуна).
Якщо доповнити конструкцію блоком вертикального відхилення, зібраним за аналогічною схемою, можна автоматизувати орієнтацію батареї в обох площинах. Якщо вказаних на схемі мікросхем не виявилося, їх можна замінити на мікросхеми серій К564, К176 (при напрузі живлення 5 ... 12 В). Транзистори КТ315А замінені будь-якими із серій КТ201, КТ315, КТ342, КТ3102, а КТ814А - будь-якими із серій КТ814, КТ816, КТ818, а також германієвими П213-П215, П21. В останньому випадку між емітерами та базами транзисторів VT3-VT6 слід включити резистори опором 1...10 кОм, щоб запобігти їх випадковому відкриванню внаслідок значного зворотного струму. Замість фотодіодів ФД256 можна поставити шматочки від сонячних елементів (включені з дотриманням полярності), фототранзистори без ланцюгів зміщення, а також фоторезистори, наприклад СФ2, СФЗ або ФСК будь-якої модифікації. Слід лише підібрати (зміною опору резистора R1) частоту тактового генератора з надійного спрацьовування цифрового компаратора. Для захисту фотодіодів від надмірного опромінення застосовано зелений світлофільтр. Між фото датчиками розміщують непрозору шторку. Її закріплюють перпендикулярно до плати з таким розрахунком, щоб при зміні кута освітлення вона затіняла один з фотодіодів. 










