Solárne panely sú veľmi často inštalované pevne a natrvalo. Je to jednoduché, no nie veľmi efektívne, keďže počas dňa sa slnko pohybuje po oblohe a množstvo svetelnej energie, ktorú solárne panely prijímajú, sa mení. Maximálny návrat solárnej batérie je možný len pri dopade svetla na panel kolmo na jeho rovinu. Aby slnečné lúče dopadali na solárny panel vždy kolmo. používajú sa solárne sledovacie systémy rôzneho dizajnu a rôznej úrovne zložitosti. Takýto systém síce komplikuje inštaláciu solárnych panelov, no umožňuje z nich vyťažiť maximum. Solárne panely stále nie sú lacné a investíciou do nich chceme určite naplno využiť ich potenciál.
Často najjednoduchšie sledovacie systémy dokážu panel otáčať iba v jednej osi. Medzi takéto zariadenia patrí dvojica fotosenzorov a dvojica komparátorov, ktoré ovládajú jeden elektromotor zaradený do uhlopriečky najjednoduchšieho H-mostu. Takéto zariadenia samozrejme tiež zvyšujú účinnosť solárnych panelov, ale nerobia to veľmi efektívne, keďže pracujú len v rámci jednej osi. Tento článok popisuje veľmi jednoduchý solárny sledovací systém, ktorý však dokáže posúvať panel v dvoch osiach, čím sa zvyšuje účinnosť solárneho poľa. Počas prevádzky sa systém priebežne snaží umiestniť panel tak, aby jeho rovina bola vždy kolmá na dopadajúce slnečné svetlo a aby sa z batérie dostal maximálny návrat elektriny. Sledovacie zariadenie sleduje slnko od úsvitu po posledné lúče západu slnka a automaticky pokračuje vo svojej práci nasledujúce ráno.
Schéma zariadenia obsahuje čip LM339, čo sú štyri analógové komparátory v spoločnom balení. Dva motory sú riadené špecializovaným mikroobvodom L293D - dvojitým H-mostom. Okrem mikroobvodov obsahuje schéma zapojenia niekoľko diskrétnych prvkov. Ako snímače intenzity svetla sa používajú fotorezistory LDR1 - LDR4, ktoré určujú polohu solárneho panelu vzhľadom na slnečné lúče.
Fotorezistorový blok spolu s komparátorom LM339 generuje riadiace signály pre budič motora L293D. Fotorezistory LDR1 a LDR2 sú upevnené v rohoch solárneho panela na osi X, v LDR3 a LDR4 - na osi Y. Úrovne nízkeho napätia.
Zvážte algoritmus práce systém na príklade jeho časti zodpovednej za pohyb pozdĺž osi X. Ak fotorezistor LDR2 dostane viac svetla ako LDR1, potom sa odpor LDR2 stane menším ako odpor LDR1. Na vstupoch komparátorov A1 a A2 (4, 7). V tomto prípade sa na výstupe komparátora A2 (1) objaví vysoká úroveň napätia. Motor M1 sa začne otáčať v jednom zo smerov (povedzme proti smeru hodinových ručičiek) a otáčať solárny panel.
Ak LDR1 dostane viac svetla ako LDR2, potom sa jeho odpor zníži ako odpor LDR2, čím sa zníži napätie na vstupoch komparátora (4, 7). Na výstupe (2) komparátora A2 sa objaví vysoká hladina a motor sa začne otáčať v opačnom smere (povedzme v smere hodinových ručičiek). Sledovanie pozdĺž osi Y funguje presne rovnakým spôsobom.
Obrázok nižšie ukazuje možný návrh solárneho sledovacieho systému. Obvod môže byť zostavený na zjednotenej doske alebo môže byť na ňu nasmerovaný konvenčný plošný spoj.
Po využití solárnych panelov na výrobu elektriny v priemyselnom meradle začali inžinieri a dizajnéri hľadať spôsoby, ako zvýšiť účinnosť takýchto elektrární. Celkový rozptyl slnečného svetla, ktorý je určený zmenou smeru dopadu slnečných lúčov na fotobunky, neumožňoval efektívne využitie solárnych panelov počas celého dňa. Východisko z tejto situácie sa našlo pomerne rýchlo – solárne panely sa začali inštalovať na pohyblivú základňu napojenú na solárny sledovací systém.
Ako viete, na získanie maximálneho výkonu zo solárnych panelov je potrebné, aby slnečné lúče dopadali na rovinu batérií kolmo. S týmto smerom lúčov môže účinnosť solárnych panelov dosiahnuť 50-55%. Pri trvalo inštalovaných batériách môže byť toto číslo znížené na 10-15% v dôsledku zmien uhla dopadu slnečného žiarenia.
Slnečné sledovacie zariadenie pozostáva z dvoch hlavných častí:
1. Riadiaca schéma, ktorá určuje polohu Slnka. Najjednoduchšia schéma solárneho sledovacieho zariadenia alebo iného sledovača (Solar Tracker) je zobrazená nižšie. Na určenie polohy Slnka sa používajú dva fotorezistory. Schéma zahŕňa:
- čip operačného zosilňovača LM1458 (K140UD20);
- tranzistory BD139 (KT815G, KT961A) a BD140 (KT814G, KT626V);
- fotorezistory;
- diódy 1N4004 (KD243G);
- rezistory a ladiace odpory.

2. Mechanizmy na otáčanie a naklápanie batérií v závislosti od smeru slnečných lúčov. Naklápací mechanizmus umožňuje použitie takýchto sledovacích systémov v akýchkoľvek zemepisných šírkach: pri inštalácii solárnych panelov v oblasti, ktorá zodpovedá 320 severnej zemepisnej šírke, musí byť os zariadenia otočená o 320 vzhľadom k horizontu. Pohony všetkých mechanizmov sledovacieho systému sú postavené na báze elektromotorov, na ktoré má vplyv riadiaci systém. Elektromotory a riadiaci systém poháňajú samotné solárne panely, takže takéto inštalácie sú autonómne.
Ako vidíte, schéma a zariadenie solárneho sledovača sú pomerne jednoduché. V priemyselnom meradle sa samozrejme používajú zložitejšie systémy, ale podobnú schému je možné zostaviť nezávisle pre domácu inštaláciu na výrobu elektriny na báze solárnych panelov.

Sieť obsahuje veľké množstvo hotových schém a riešení pre solárne sledovacie systémy. Takže, ak je potrebné vylepšiť dizajn solárnych panelov a zvýšiť ich výkon, vždy je tu možnosť urobiť to sami.
Solárny sledovač je elektronicko-mechanický systém určený na nasmerovanie solárnych panelov na Slnko. Systém sleduje polohu Slnka na oblohe a riadi servo, ktoré otáča panely v príslušnom smere. Použitie takéhoto sledovača vám umožňuje získať maximálny výkon zo solárnych panelov.
Väčšina domácich sledovačov nájdených na internete je zostavená na Arduine, na určenie polohy Slnka sa používajú fotosenzory. V závislosti od stupňa osvetlenia a vzájomnej polohy fotosnímačov sa vykoná otočenie v smere maximálneho osvetlenia. Táto metóda má nevýhody: nie je známe, ako sa systém bude správať v zamračenom počasí; nízka odolnosť proti hluku, pokiaľ ide o reakciu na mesačné svetlo a jasné zdroje svetla, ako aj na jednotlivé mraky.
Kvôli vyššie uvedeným nevýhodám som vyvinul vlastnú verziu ekonomického solárneho sledovača so servomotorom, ktorý poskytuje sledovanie Slnka po celej viditeľnej oblohe kedykoľvek, bez ohľadu na geografickú polohu.
Polohu Slnka na oblohe možno určiť nielen osvetlením fotosenzorov, ale aj vzorcami nebeskej mechaniky na základe zemepisných súradníc pozorovacieho bodu a presného času. Teraz bude veľa definícií a vzorcov súvisiacich s nebeskou mechanikou, takže sa pripravte na namáhanie svojich konvolúcií). Ak chcete nasmerovať solárne panely, musíte určiť horizontálne súradnice Slnka, to je výška a azimut. Stred tohto súradnicového systému sa zhoduje s polohou pozorovateľa, výpočty sa vykonávajú vzhľadom na rovinu matematického horizontu.
Výška h je uhol medzi rovinou podložky. horizont a smer k svietidlu, počítané od 0⁰ do +90⁰ k zenitu a od 0⁰ do -90⁰ k najnižšiemu bodu.
Azimut A - uhol medzi poludňajšou čiarou (približne povedané smerom na juh) a priesečníkom roviny podložky. horizont s rovinou vertikálneho kruhu svietidla. Počíta sa od južného bodu v smere dennej rotácie nebeskej sféry v rozmedzí 0⁰ ... 360⁰ alebo od 0⁰ do +180⁰ na západ a od 0⁰ do -180⁰ na východ. Horizontálne súradnice hviezdy sa neustále menia, v dôsledku dennej rotácie Zeme.
Nižšie sú uvedené vzorce na výpočet výšky a azimutu svietidla:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ náklady);
A = atan2 (cos
kde δ je deklinácia hviezdy, t je hodinový uhol hviezdy, ϕ je zemepisná šírka bodu pozorovania (0⁰…+90⁰ pre severnú pologuľu, 0⁰…-90⁰ pre južnú, 0⁰ je rovník).
Dešifrovanie funkcie atan2(y, x): 
Ako vidíte, na výpočet horizontálnych súradníc je potrebné vypočítať deklináciu a hodinový uhol hviezdy. Tieto súradnice sa vzťahujú na prvý rovníkový súradnicový systém, kde hlavnou rovinou je rovina nebeského rovníka.
Deklinácia δ - uhol medzi rovinou nebeského rovníka a smerom k svietidlu sa meria od 0⁰ do +90⁰ smerom k severnému pólu a od 0⁰ do -90⁰ smerom k južnému pólu.
Hodinový uhol t je dihedrálny uhol medzi rovinou nebeského poludníka a deklinačnou kružnicou svietidla. Počíta sa v smere dennej rotácie nebeskej sféry, na západ od horného bodu nebeského rovníka, v rámci 0⁰ ... 360⁰ alebo od 00:00 do 24:00 (hodinu). Hodinový uhol možno tiež merať od 0° do 180° (od 00:00 do 12:00) na západ a od 0° do -180° (od 00:00 do -12:00) na východ. Hodinový uhol sa rovná 0 v momente hornej kulminácie hviezdy, pre Slnko na pravé poludnie (nie vždy v rovnaký čas, keď hodiny ukazujú 12:00 miestneho času).
Deklinácia Slnka sa v priebehu roka mení (nerovnomerne) od -23,43⁰ do +23,43⁰ v dôsledku orbitálneho pohybu Zeme okolo Slnka a nesúvisí s dennou rotáciou Zeme. Na určenie deklinácie Slnka pre ktorýkoľvek deň v roku je najjednoduchší spôsob z tabuľky priemerných hodnôt deklinácie pre 4-ročný cyklus. Tabuľku si môžete stiahnuť na konci článku.
Hodinový uhol hviezdy sa počas dňa mení (v dôsledku dennej rotácie Zeme), dá sa vypočítať so znalosťou skutočného slnečného času:
t \u003d Ts.ist - 12:00 h, (-12:00 ... + 11:59),
kde Ts.ist je skutočný slnečný čas (00:00…23:59h).
Skutočný slnečný čas možno vypočítať na základe znalosti miestneho času, časového pásma a zemepisnej dĺžky pozorovacieho bodu:
Ts.ist = Ts.av + EOT alebo Ts.ist = UTC + λ + EOT,
kde Ts.av je stredný slnečný čas v určitom bode na Zemi (závisí od zemepisnej dĺžky bodu), UTC je univerzálny koordinovaný čas, λ je zemepisná dĺžka bodu pozorovania v jednotkách hodín, EOT je časová rovnica.
Koordinovaný svetový čas možno vypočítať z miestneho času (Tm) a časového pásma (N): UTC = Tm – N. Zemepisná dĺžka λ sa meria od 0⁰ do 180⁰ východne od hlavného poludníka (východná zemepisná dĺžka) a od 0⁰ do -180⁰ na západ (západná dĺžka). Pri dosadzovaní do vyššie uvedeného vzorca je potrebné zemepisnú dĺžku previesť na hodiny (1⁰ = 4 min).
Časová rovnica EOT ukazuje rozdiel medzi stredným slnečným časom a skutočným slnečným časom, pretože denný pohyb Slnka je nerovnomerný v dôsledku elipticity obežnej dráhy Zeme, ako aj sklonu zemskej osi k rovine ekliptiky:
EOT = 9,87 ∙ sin2B - 7,53 ∙ cosB - 1,5 ∙ sinB,
kde B = (360⁰ (N-81))/365, N je poradové číslo dňa v roku.
V priebehu roka sa teda hodnota časovej rovnice mení z -14,3 minúty na +16,4 minúty.
Nižšie je uvedený graf, ako sa mení časová rovnica v priebehu roka: 
Všetky tieto výpočty som musel vložiť do programu mikrokontroléra, neodvážil som sa písať v assembleri, tak som začal študovať SI, musel som sa celé týždne pohrávať so vzorcami a výpočtami, aby som dostal správny výsledok, popri tom som študoval SI. Vďaka tomu sa mi podarilo napísať funkčný program, pričom chyba výpočtu nepresahuje ±1⁰.
Solárny tracker bol koncipovaný pre malú solárnu batériu s výkonom 2W a napätím 6V na nabíjanie lítium-iónovej batérie, ale je lepšie použiť výkonnejšiu batériu aspoň 4W. Ako elektrické pohony som použil servá MG996R (dá sa kúpiť v Číne, odkaz je uvedený na konci článku). Okrem toho som si zakúpil špeciálne držiaky na zostavenie inštalácie alt-azimut (odkaz na objednávku na konci článku). Zostavená konštrukcia umožňuje orientáciu solárnej batérie vo výške a azimute, pričom servo azimutu je stacionárne a otáča výškové servo spolu s držiakmi.
Nižšie je schéma solárneho sledovača: ![]()
Obvod je založený na mikrokontroléri PIC16F876A, ktorý má značné množstvo pamäte a obsahuje množstvo periférnych modulov. Celá konštrukcia je napájaná Li-ion batériou, ktorá sa podľa toho nabíja zo solárnej batérie cez modul založený na čipe TP4056, ide o špecializovaný regulátor nabíjania pre Li-ion batérie (odkaz na objednávku na konci článku) . Na určenie aktuálneho času a dátumu schéma využíva modul (odkaz na objednanie na konci článku). Hodiny sú celkom presné, časový posun je ± 2 minúty za rok, už som o nich písal podrobný článok, kto chce, môže sa zoznámiť. Na zobrazenie parametrov slúži digitálny indikátor na (odkaz na objednanie na konci článku).
Maximálne napätie na Li-ion batérii nepresahuje 4,1V, čo nestačí na napájanie serv, preto bol do obvodu pridaný step-up modul na báze čipu MT3608 (odkaz na objednávku na konci článku ). Minimálne vstupné napätie modulu je 2V, maximálny zaťažovací prúd 2A, modul má viacotáčkový premenlivý odpor na úpravu výstupného napätia. Kvôli úspore energie nie je napájanie serv dodávané neustále, ale iba na zmenu polohy hriadeľa. Napájanie je spínané pomocou p-kanálového tranzistora VT1 s efektom poľa, modul meniča je tiež riadený z mikrokontroléra.
Modulová doska neposkytuje kontakt na ovládanie, preto je potrebné dodatočne prispájkovať vodič na 4. pin čipu MT3608, ide o vstup zapnutia / vypnutia prevodníka. Na doske je tento kolík pripojený k napájaciemu zdroju „+“, najprv musíte odrezať stopy vhodné pre tento kolík (na to budete musieť odspájkovať mikroobvod) alebo zdvihnúť kolík nad dosku. Na doske modulu je nainštalovaný rezistorový čip deliča napätia, zvýšenie odporu tohto odporu zníži aj spotrebu v režime spánku, vymenil som ho za iný, s odporom 9,1 kOhm, spočiatku to bolo 2,2 kOhm. Po výmene je potrebné nastaviť výstupné napätie na približne 5-5,5V pre napájanie serv, obrázok nižšie: 
Hodinový modul je tiež potrebné vylepšiť, aby sa znížila spotreba energie, musíte prispájkovať pamäťový čip 24c32, LED diódu „POWER“, ako aj rezistor (200 Ohm), cez ktorý sa dodáva externé napájacie napätie do batérie. Prečo to Číňania urobili, zostáva nepochopiteľné, pretože batéria nie je určená na nabíjanie, pozri obrázok nižšie: 
LED HL1 je nastavená tak, aby signalizovala chybu komunikácie s hodinami DS3231 (cez rozhranie I2C), LED dióda začne blikať, ak hodiny nereagujú.
Montáž nastavenia alt-azimutu by sa mala začať, keď sú servá nastavené do strednej polohy, k tomu dôjde pri prvom zapnutí zariadenia, na indikátore sa zobrazí nápis „Cent“. Servo azimutu je vhodné namontovať na dosku, ktorá bude slúžiť ako základ inštalácie, alebo na stojan tak, aby výstupný hriadeľ smeroval kolmo nahor. Ďalej je potrebné pripevniť výškovú konzolu serva, najprv musíte na konzolu priskrutkovať posuvnú objímku, potom objímku adaptéra. Držiak musí byť nastavený kolmo na dlhú stranu serva azimutu, ako je znázornené na fotografii: 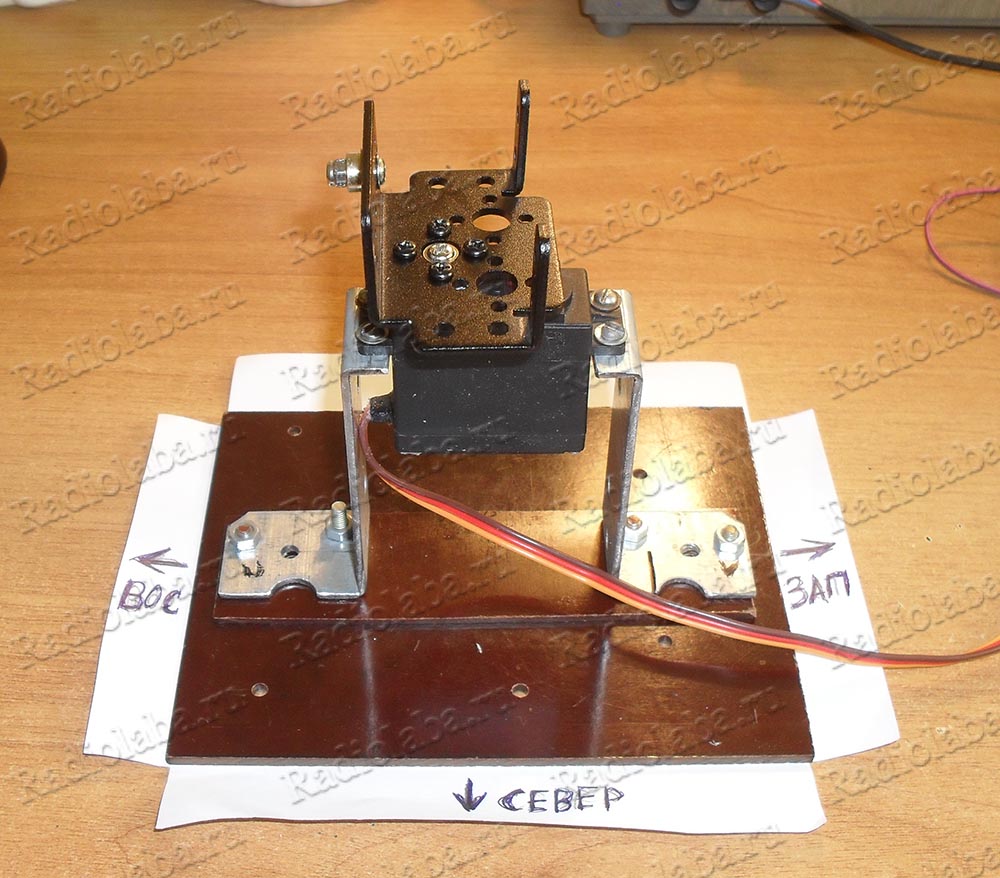
Pri montáži je ťažké dosiahnuť kolmú polohu, ale nie je to potrebné, prípustné sú odchýlky v rozmedzí ± 5-10 stupňov. V budúcnosti túto odchýlku odstráni softvérová úprava.
Po upevnení výškového serva zostáva upevniť konzolu nosiča, najskôr vyskúšajte objímku adaptéra na hriadeli serva, vyberte polohu tak, aby konzola nosiča po montáži smerovala kolmo nahor. Opäť nie je potrebné nastavovať presnú polohu, ako som už povedal. Celkový pohľad na inštaláciu je znázornený na nasledujúcej fotografii: 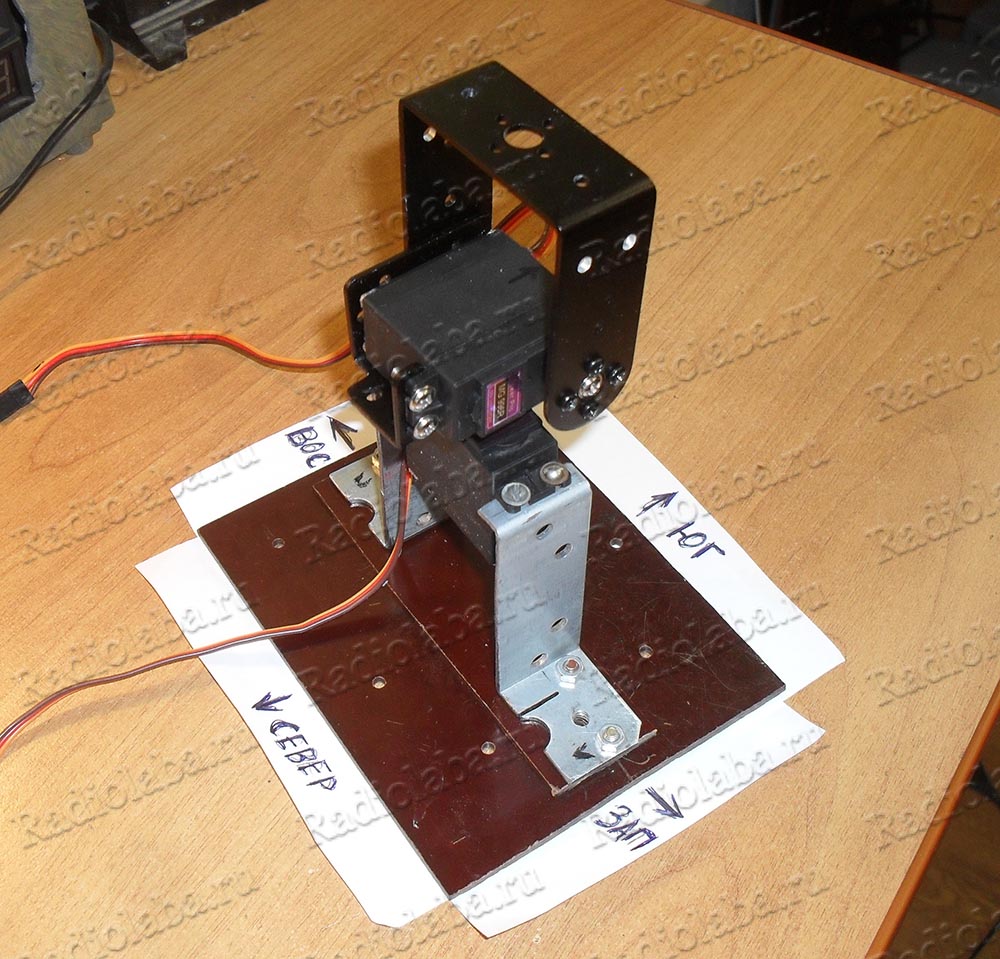
Nasleduje postup nastavenia krajných polôh serv. Nastavenie by sa malo vykonávať na rovnom povrchu, keď je hriadeľ serva azimutálne vertikálny (os otáčania smeruje pozdĺž olovnice). Po stlačení tlačidla „Enter“ sa nosná konzola otočí smerom k podmienenému severu a zaujme vodorovnú polohu (na indikátore sa zobrazí nápis „sever“): 
Ak dôjde k odchýlke od horizontály, musíte upraviť polohu držiaka pomocou tlačidiel „Nastaviť“ a „Vybiť“. Tým sa nastaví krajná poloha serva. Ďalej, keď stlačíte tlačidlo „Enter“, zátvorka sa otočí smerom k podmienenému juhu (na indikátore je napísaný juh). V prípade potreby upravte vodorovnú polohu držiaka, ako je popísané vyššie.
Ďalším stlačením tlačidla „Enter“ sa rameno otočí smerom na konvenčný východ (na indikátore je nápis EASt). Tlačidlá „Set“ a „Discharge“ korigujú smer, zatiaľ čo je vhodné zamerať sa na telo azimutálneho servopohonu, je potrebné, aby držiak smeroval pozdĺž dlhej strany tela pri pohľade zhora: 
Pri ďalšom stlačení tlačidla „Enter“ sa držiak otočí smerom na západ (ukazovateľ ukazuje nápis WESt), nastavenie sa vykoná tak, ako je popísané vyššie.
V dôsledku korekcie sa držiak otočí do výšky a azimutu v rámci 180⁰, korekčné hodnoty sú uložené v pamäti EEPROM mikrokontroléra. Po stlačení tlačidla „Enter“ sa zátvorka presunie opraveným smerom na podmienený juh. Pre správnu orientáciu solárnej batérie by smer na podmienený juh mal naznačovať skutočný bod juhu v danej oblasti a hriadeľ servopohonu v azimute je umiestnený vertikálne pozdĺž olovnice.
Po opätovnom stlačení tlačidla „Enter“ by ste mali nastaviť čas, dátum, časové pásmo, súradnice polohy a trvanie režimu spánku. V súlade s tým sa pre každý parameter na indikátore zobrazia nasledujúce nápisy:
– miestny čas, štandardne 0 h 0 min;
– zemepisná dĺžka miesta, štandardne -0 stupňov. 0 min. (pre západnú zemepisnú dĺžku sa vloží znamienko mínus „-“);
– zemepisná šírka polohy, predvolene -0 stupňov. 0 min. (pre južnú zemepisnú šírku je uvedené znamienko mínus „-“);
– časové pásmo, štandardne -0, (pre západnú zemepisnú dĺžku je vložené znamienko mínus „-“);
– trvanie režimu spánku, predvolená 1 min.
Tlačidlami „Discharge“ a „Set“ sa nastavujú hodnoty parametrov, po stlačení tlačidla „Enter“ sa hodnoty času a dátumu zapíšu do , ostatné parametre sa uložia do pamäte EEPROM mikrokontroléra. Po zadaní všetkých parametrov sa na indikátore zobrazí nápis SUCCES (na 1 sekundu, potom indikátor zhasne), potom je inštalácia zameraná na Slnko, podľa zadaných parametrov.
Pre úsporu energie sa mierenie na Slnko vykonáva po určitom čase, ktorý sa nastavuje v parametri Trvanie režimu spánku. Po nasmerovaní sú servá odpojené, mikrokontrolér prejde do režimu spánku, celková spotreba trackera sa zníži na 160 μA. Trvanie „spánku“ je možné nastaviť v rozmedzí 1-255 minút.
Po opätovnom zapnutí sledovača (po vypnutí napájania) sa najskôr skontroluje pamäť EEPROM, ak sú uložené parametre správne, sledovač pokračuje v sledovaní Slnka, pričom digitálny indikátor zostáva v režime spánku a nezapne sa šetriť energiu. Vo všeobecnosti môžete vypnúť napájanie indikátora po počiatočnom zadaní parametrov. Ak chcete znova prejsť do režimu korekcie, musíte podržať tlačidlo „Set“ a zapnúť sledovač. Ak sú parametre načítané z EEPROM nesprávne alebo chýbajú, prejde tiež do režimu opravy.
Do programu mikrokontroléra som dodatočne pridal funkciu výstupu hlavných parametrov cez rozhranie UART. Po výpočte polohy Slnka mikrokontrolér odovzdá aktuálnu hodnotu času, dátumu, sériového čísla dňa, súradnice polohy zadané pri nastavovaní, ako aj aktuálne hodnoty výšky a azimutu Slnka. Každý parameter začína symbolom „$“ a končí symbolmi „\r“, „\n“. Tieto údaje je možné zobraziť na počítači po pripojení sledovača cez adaptér USB-UART. V nastaveniach terminálového programu je potrebné nastaviť nasledovné nastavenia: prenosová rýchlosť 9600 bps, 8 dátových bitov, jeden stop bit. Nižšie je snímka obrazovky z terminálového programu: ![]()
Servá MG996R nie sú vo vnútri skrine chránené pred vlhkosťou, takže v prípade vonkajšieho použitia musia byť servá utesnené. Odstráňte štyri skrutky zo spodnej strany puzdra a naneste neutrálny silikónový tmel medzi spoje puzdra a naneste tmel okolo manžety, aby sa drôty dostali do puzdra. Na ozubené kolesá prevodovky môžete dodatočne naniesť mazivo, pretože továrenské prakticky neexistuje. Podľa recenzií je tuk SHRUS-4 najvhodnejší, na rozdiel od litolu nemrzne v chlade. Na utesnenie horného otvoru je možné na výstupný hriadeľ nasadiť silikónový krúžok a z adaptéra, ktorý je namontovaný na hriadeli, je potrebné odstrániť skosenie, aby nedochádzalo k nadmernému treniu.
Na nosnú konzolu som pripevnil obdĺžnikovú textolitovú dosku, na ktorú som pomocou obojstrannej pásky nalepil solárnu batériu. Keďže servá sú väčšinu času bez napätia, je možné otáčať hriadeľom na výšku pod vplyvom gravitácie solárneho poľa. Aby som tomu zabránil, na boky držiaka nosiča som pripevnil dlhé protizávažia vyrobené z uholníkov a dosiek. Zmenou hmotnosti protizávaží som vyvážil konštrukciu pozdĺž osi rotácie výšky.
Sledovač vykonáva navádzanie, keď je Slnko nad horizontom, teda keď je jeho výška väčšia ako 0⁰. Keď Slnko zapadne pod horizont (záporná hodnota nadmorskej výšky), sledovač nasmeruje slnečné pole na východ a ďalšie sledovanie sa obnoví pri východe Slnka. Sledovanie sa vykonáva po celej viditeľnej oblasti oblohy.
Denný pohyb Slnka a hviezd je možné sledovať na počítači v programe Stellarium, bezplatné virtuálne planetárium, ktoré zobrazuje realistickú hviezdnu oblohu. Program zobrazuje pohyb svietidiel na oblohe, kedykoľvek vidíte polohu Slnka a hviezd, k dispozícii sú aj údaje o rôznych súradniciach.
Zariadenie som osadil na dosku plošných spojov, ktorú som navrhol tak, aby pasovala do puzdra GAINTA G1202G. Na doske je miesto pre prepojku (jumper), pomocou ktorej môžete vypnúť napájanie digitálneho indikátora.
Tranzistor VT1 s efektom poľa je možné nahradiť IRLML2244, IRLML6402. Môžete tiež použiť tranzistory v balení SOIC-8 (budete musieť prerobiť dosku): IRF9332, IRF9310, IRF9317.
Pri negatívnych teplotách lítium-iónové batérie strácajú významnú kapacitu (elektrolyt zamrzne), neodporúča sa používať batérie pri teplotách pod +5 ⁰C, pretože to vedie k predčasnému zníženiu zdroja. Ak teda plánujete prevádzkovať tracker v mrazivom počasí, je lepšie použiť LiFePO4 lítium-železo-fosfátovú batériu. Batérie tohto typu sú mrazuvzdornejšie, rozsah prevádzkových teplôt je od -30 ⁰C do +55 ⁰C, maximálne napätie 3,65 V, minimum 2 V, priemer 3,3 V, teda nižšie ako Li -ión. Medzi výhody patrí aj stabilné vybíjacie napätie blízke 3,2V. Na konci článku sú odkazy na objednanie batérie, ako aj modulu na nabíjanie.
Na základe solárneho sledovača môžete vytvoriť malý autonómny systém, ktorý nevyžaduje externé napájanie, ako je vzdialená meteostanica alebo bezpečnostný systém pre letný dom atď. Servá môžete vymeniť za výkonnejšie a nainštalovať väčší solárny panel. Je možné prispôsobiť obvod pre solárne panely na 12, 18V, na nabíjanie niekoľkých sériovo zapojených batérií, ale na to budete musieť zmeniť obvod a použiť iné nabíjacie moduly.
Nižšie sú uvedené odkazy na objednanie modulov a komponentov na zostavenie solárneho sledovača:
Solárna batéria 6V 4,5W
Modul hodín reálneho času DS3231
Digitálny indikátor na ovládači MAX7219
Modul nabíjania Li-ion batérie na TP4056
Batéria LiFePO4 6500 mAh
Batéria LiFePO4 1800 mAh
Modul nabíjania batérie LiFePO4
Servo MG996R
Konzoly na montáž alt-azimutálnej inštalácie pre servá MG996R
Boost konvertor na MT3608
![]()
![]()
![]()
![]()
![]()
![]()
Na začiatok sa asi oplatí povedať, čo tento článok znamená solárny sledovač. Stručne povedané, zariadenie je pohyblivý stojan pre solárny panel, ktorý je potrebný na to, aby v našich miernych zemepisných šírkach panel zbieral dostatočné množstvo svetla a menil svoju polohu podľa slnka.
V tomto prípade bol prototyp solárneho sledovača zostavený na báze Arduina. Na otáčanie plošiny v horizontálnej a vertikálnej osi sa používajú servopohony, ktorých uhol natočenia závisí od výkonu svetla dopadajúceho na fotoodpory. Ako telo sa používa obľúbený sovietsky kovový konštruktér.
Bolo by užitočné spomenúť, že to všetko bolo vykonané ako projekt kurzu, takže som sa neobťažoval kúpiť a namontovať samotný solárny panel a batériu, pretože ich prítomnosť nesúvisí s prácou sledovača. Ako ospravedlnenie môžem povedať, že možnosti sovietskeho kovového konštruktéra sú obrovské, takže priskrutkovať k nemu malý solárny panel na nabíjanie telefónu nebude ťažké, ak sa takáto túžba objaví.
Čo sa teda použilo pri montáži:
Rečník, ktorý sa zrazu objavil na zozname, musel zvýšiť high-tech efekt. Faktom je, že servá sa môžu otáčať iba o 180 stupňov a viac nepotrebujeme, keďže ideme za slnkom. No pri testovaní projektu, keď sa dve minúty ukážky nedá poriadne ísť za slnkom, sa ukázalo, že by bolo fajn signalizovať, kedy sa oplatí prestať mávať baterkou, lebo servo dosiahlo mŕtveho. zónu. Na tento účel bola pridaná vyššie uvedená výzva.
Začnime teda zbierať sledovač. Na začiatok rozdeľme nadchádzajúcu časť práce na podmienené štyri fázy: zostavenie stojana pre solárne panely a montáž serv, pripevnenie svetlocitlivých prvkov k zostavenej konštrukcii, spájkovanie a písanie kódu pre Arduino.
Fotoodpory sú celkom bezpečne pripevnené k telu, jediné, s čím by sa oplatilo pracovať, je presnosť ich umiestnenia na platforme: teraz nepozerajú dostatočne kolmo, čo môže rozčúliť perfekcionistov a mierne pokaziť presnosť otáčania.
Trochu obvodov: pripojenie fotocitlivých prvkov sa vykonáva podľa obvodu deliča napätia, pre ktorý boli potrebné výstupné odpory uvedené v zozname prvkov. Všetky fotorezistory sú prispájkované na spoločný kolík pripojený k päťvoltovému napájaciemu výstupu Arduina. Pre pohodlie a estetiku sú nohy fotorezistorov prispájkované ku kontaktom dvoch trojžilových izolovaných vodičov (jeden kontakt zostal nepoužitý a skrytý). Všetky detaily obvodov je možné vidieť na obrázku nižšie.




Kód
#include

Kanál „bang-bang“ ukázal, ako vyrobiť domáci solárny sledovač pre panely. Po slnku sa budú automaticky otáčať, čím sa zvýši účinnosť elektrárne.
Budete potrebovať dva solárne panely, každý s výkonom 3,5 wattu. Na výstupe má jeden viac ako 6 voltov, čo pri zapojení dvoch batérií do série dá viac ako 12 voltov. USB konektor na zadnej strane. Tri výstupy z troch segmentov batérie. Každý z nich generuje 2 volty. To znamená, že ak je to potrebné, môžete sa zodpovedajúcim spôsobom pripojiť a získať 2, 4, 6 voltov.

Ďalším dôležitým uzlom sú dve servá. Jeden bude otáčať solárne pole horizontálne a druhý vertikálne. Tieto pohony nie sú jednoduché, nie je také ľahké ich otáčať. Je potrebné určité zlepšenie. V súprave s každým z motorov sú plastové kríže, kotúče, skrutky na upevnenie. Kupované držiaky k motoru. Súčasťou sú aj montážne skrutky, ložisko a kotúče. regulátor nabíjania. Energiu bude prijímať zo solárnych panelov a odovzdávať ju do batérie.
Začnime pracovať vlastnými rukami s elektronickým plnením. Schéma sledovača pre solárny panel je uvedená nižšie.  Schéma zapojenia, doska, program na úpravu dosky: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Schéma zapojenia, doska, program na úpravu dosky: https://cloud.mail.ru/public/DbmZ/5NBCG4vsJ
Okruh je veľmi jednoduchý a ľahko sa opakuje. Je to najúspešnejšia z niekoľkých osvedčených možností. Ale aj jej autor sa musel trochu zmeniť. Musel som zmeniť hodnoty variabilných a pevných rezistorov, bol navrhnutý obvod dosky plošných spojov.
Na začiatok si vytlačte obvodovú dosku sledovača na špeciálny papier. Ide o technológiu laserového žehlenia. Papier má lesklý vzhľad. Na rubovej strane je obyčajná matná. Musíte tlačiť na laserovej tlačiarni na lesklú stranu. Po kontakte so žehličkou ju treba nechať vychladnúť a papier sa ľahko odlepí od vrstvy.

Pred prenosom musí byť textolit odmastený. Najlepšie je použiť jemný brúsny papier. Vzor priložíme na dosku a žehlíme horúcou žehličkou 2 minúty.
Teraz musíte vyleptať dosku sledovača. Môže sa použiť persíran amónny. Predáva sa v predajniach rádií. Rovnaké riešenie je možné použiť niekoľkokrát. Pred použitím je žiaduce zahriať kvapalinu na 45 stupňov. To výrazne urýchli proces leptania. Po 20 minútach bola tabuľa úspešne dokončená. Teraz musíte odstrániť toner. Opäť použite brúsny papier alebo acetón.
Teraz môžete urobiť dieru v doske. Môžete začať spájkovať diely.
Srdcom solárneho sledovača je operačný zosilňovač lm324n. Dva tranzistory typ 41c, typ 42c. Jeden keramický kondenzátor 104. Autor vývoja nahradil veľa detailov typom smd. Namiesto 5408 diód sa použili ich analógy typu smd. Hlavná vec je použiť aspoň 3 ampéry. Jeden rezistor pre 15 kiloohmov, 1 pre 47 kiloohmov. dva fotorezistory. 2 ladiace odpory pre 100 a 10 kiloohmov. Ten je zodpovedný za citlivosť fotosnímača.
 Heliostat, alebo inak, tracker, je zariadenie na sledovanie slnka, v našom prípade na otáčanie solárnych panelov tak, aby boli vždy kolmo na slnko. Nie je žiadnym tajomstvom, že práve v tomto prípade dáva solárny panel maximálny výkon. Vo vyššie uvedenom diagrame využíva solárne sledovacie zariadenie (heliostat) pulzné riadenie a bez akejkoľvek ľudskej pomoci je schopné nasmerovať solárne pole na najlepšie osvetlenie.
Heliostat, alebo inak, tracker, je zariadenie na sledovanie slnka, v našom prípade na otáčanie solárnych panelov tak, aby boli vždy kolmo na slnko. Nie je žiadnym tajomstvom, že práve v tomto prípade dáva solárny panel maximálny výkon. Vo vyššie uvedenom diagrame využíva solárne sledovacie zariadenie (heliostat) pulzné riadenie a bez akejkoľvek ľudskej pomoci je schopné nasmerovať solárne pole na najlepšie osvetlenie.
Obvod heliostatu pozostáva z generátora hodín (DD1.1, DD1.2), dvoch integračných obvodov (VD1R2C2, VD2R3C3), rovnakého počtu tvarovačov (DD1.3, DD1.4), digitálneho komparátora (DD2), dvoch meniče (DD1. 5, DD1.6) a tranzistorový spínač (VT1-VT6) pre smer otáčania elektromotora M1, ktorý riadi otáčanie plošiny, na ktorej je inštalovaná solárna batéria. Pri zapnutom napájaní generátor na prvkoch DD1.1, DD1.2 generuje hodinové impulzy, ktoré nasledujú s frekvenciou asi 300 Hz. Keď je zariadenie v prevádzke, porovnávajú sa doby trvania impulzov generovaných meničmi DD1.3, DD1.4 a integračnými obvodmi VD1R2C2, VD2R3C3. Ich strmosť sa mení v závislosti od integračnej časovej konštanty, ktorá zase závisí od osvetlenia fotodiód VD1 a VD2 (nabíjací prúd kondenzátorov C2 a C3 je úmerný ich osvetleniu). Signály z výstupov integračných obvodov sú privádzané do tvarovačov úrovne DD1.3, DD1.4 a potom do digitálneho komparátora vyrobeného na prvkoch mikroobvodu DD2. V závislosti od pomeru trvania impulzov vstupujúcich do komparátora sa na výstupe prvku DD2.3 (pin 11) alebo DD2.4 (pin 4) objaví nízkoúrovňový signál. Pri rovnakom osvetlení fotodiód sú na oboch výstupoch komparátora prítomné vysokoúrovňové signály. Na riadenie tranzistorov VT1 a VT2 sú potrebné meniče DD1.5 a DD1.6. Vysoká úroveň signálu na výstupe prvého meniča otvára tranzistor VT1, na výstupe druhého - VT2. Záťaže týchto tranzistorov sú kľúčom k výkonným tranzistorom VT3, VT6 a VT4, VT5, ktoré spínajú napájacie napätie elektromotora M1. Obvody R4C4R6 a R5C5R7 vyhladzujú zvlnenie na bázach riadiacich tranzistorov VT1 HVT2. Smer otáčania motora sa mení v závislosti od polarity pripojenia k zdroju energie. Digitálny komparátor neumožňuje súčasné otvorenie všetkých kľúčových tranzistorov a tým zabezpečuje vysokú spoľahlivosť systému.
Ráno s východom slnka bude osvetlenie fotodiód VD1 a VD2 iné a elektromotor začne otáčať solárny panel zo západu na východ. So zmenšujúcim sa rozdielom trvania impulzov tvarovačov sa bude skrátiť trvanie výsledného impulzu a postupne sa bude spomaľovať rýchlosť otáčania solárnej batérie, čo zabezpečí jej presné umiestnenie na slnku. Pri pulznom riadení sa teda otáčanie hriadeľa motora môže prenášať priamo na plošinu so solárnou batériou, bez použitia prevodovky. Počas dňa sa bude platforma solárnych panelov otáčať pohybom slnka. S nástupom súmraku bude trvanie impulzov na vstupe digitálneho komparátora rovnaké a systém prejde do pohotovostného režimu. V tomto stave prúd spotrebovaný zariadením nepresiahne 1,2 mA (v režime orientácie závisí od výkonu motora).
Ak je dizajn doplnený o vertikálny vychyľovací blok zostavený podľa podobnej schémy, je možné plne automatizovať orientáciu batérie v oboch rovinách. Ak zrazu na diagrame nie sú uvedené žiadne mikroobvody, možno ich nahradiť mikroobvodmi série K564, K176 (s napájacím napätím 5 ... 12 V). Tranzistory KT315A sú zameniteľné s ktorýmkoľvek zo série KT201, KT315, KT342, KT3102 a KT814A - s ktorýmkoľvek zo série KT814, KT816, KT818, ako aj s germániom P213-P215, P217. V druhom prípade by mali byť medzi žiariče a bázy tranzistorov VT3-VT6 pripojené odpory s odporom 1 ... 10 kOhm, aby sa zabránilo ich náhodnému otvoreniu v dôsledku výrazného spätného prúdu. Namiesto fotodiód FD256 môžete umiestniť kúsky zo solárnych článkov (zapojené polaritou), fototranzistory bez predpätia, ako aj fotorezistory, napríklad SF2, SFZ alebo FSK akejkoľvek modifikácie. Je len potrebné zvoliť (zmenou odporu rezistora R1) frekvenciu generátora hodín podľa spoľahlivej činnosti digitálneho komparátora. Na ochranu fotodiód pred nadmerným žiarením sa používa filter zeleného svetla. Medzi fotosnímače je umiestnená nepriehľadná clona. Je pripevnený kolmo k doske tak, že pri zmene uhla osvetlenia zakrýva jednu z fotodiód. 










